Paso 11:


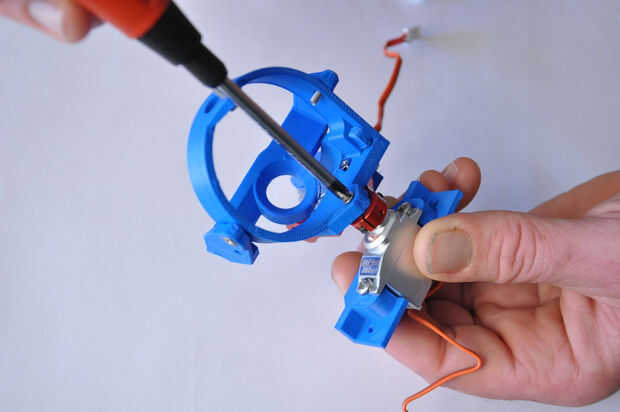
Ahora Atornille un servo para el portador de servo y otro para el conjunto del anillo inferior. Asegúrese de que ambos servos son la forma correcta de ronda.
Ahora tenemos a los servos. Esto requiere subir el firmware a la caja del cerebro y el software a su PC. Este proceso está cubierto en un separado instructable. Luego se ejecuta el software, con los cables de servo y una fuente de energía del servo conectado. Desplácese a 'recortar' y ambos servos a noventa grados. Luego ir a los controles de conducción y compruebe que ambos servos están moviendo cuando juegas con las teclas de dirección.
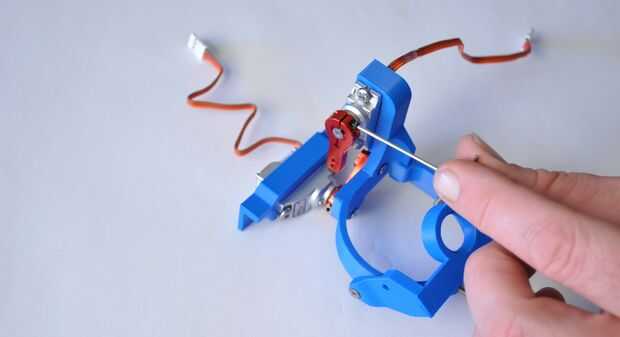
En el conjunto del anillo inferior del perno ahora ambos brazos de servo a sus lugares.
Cada brazo tiene dos pequeños tornillos de allen para apretar el brazo en el servo. Cuando ambos servos se unen a sus respectivos brazos, apriete los tornillos allen.
Trate de no mover los ejes servo durante este proceso. También, probar e instalar el servo inferior en su portador más plana posible en relación con el anillo inferior.

 de radio")











