Paso 1: Lo que se necesita.
Para una completa
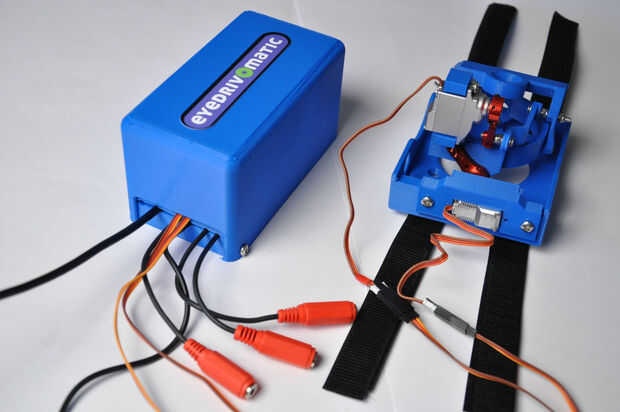
Sistema de Eyedrivomatic (caja de un cerebro electrónico mano y localizador ajustable)
1 x Arduino Uno R3
1 x 3d impreso piezas para caja de cerebro (placa base, tapa y dos piezas de sujeción del cable)
1 x 3d impreso piezas de mano electrónico (pieza base, X portador del servo, el anillo inferior, Y portador del servo,
anillo superior, brazo de transmisión)
1 x 3d impreso manga de joystick (el diámetro interior correcto para caber perfectamente su eje de palanca de mando)
1 x 3d impreso piezas para placa localizador ajustable (anillo inferior, superior anillo, anillo de retención)
2 x Turnigy 380Max Micro servo (o similar alto torque micro servo)
2 x brazos de servo de metal 25t (el diseño llama para un modelo específico, vea la ilustración)
1 x protector de relé (el diseño llama para un modelo específico. Véase ilustración de abajo)
1 x protector de servo/sensor (el diseño llama para un modelo específico. Véase ilustración de abajo)
1 x USB cable A USB B (longitud requerida depende de donde se ubicará su caja cerebral)
1 x USB A enchufe de la C.C. (el tipo de enchufe de CC no es importante, como va a ser removida)
2 x cables de extensión de servos, machos a hembra (otra vez longitud requerida depende de ubicación)
20 x cabeza No6, Pozi autorroscantes tornillos de 13mm
10 x cabeza No6, Pozi autorroscantes tornillos de 16mm
10 x M3 tornillo, avellanada, pozi
10 x tuerca de nyloc de M3
10 arandelas planas x M3
1 x-adhesivo gancho y cinta del lazo. 20mm de ancho. 60cm del gancho y de lazo
1 x pegamento estupendo
1 x cinta doble cara espuma (5 mm o 10 mm ancho o corte hacia abajo en un rollo más amplia)

 de radio")











