Paso 5: Construir la placa de interfaz


Una hoja de datos para el transistor 2N7000 puede encontrarse aquí:
http://www.fairchildsemi.com/DS/2N/2N7000.pdf
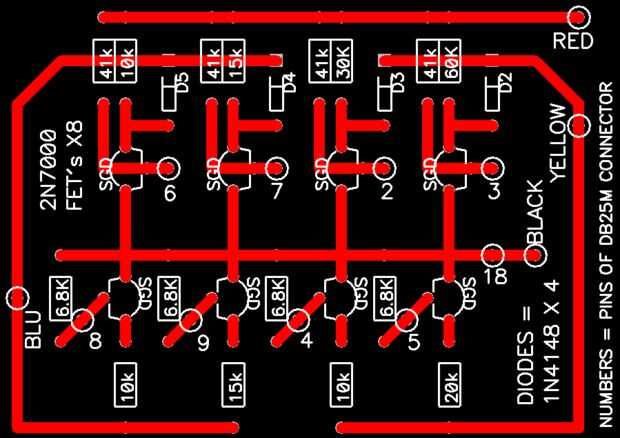
El circuito contiene ocho transistores. Dos de ellos tirón del cable hacia delante/hacia atrás hacia tierra a través de una resistencia de cada uno. Uno tiene una resistencia más grande y otro más pequeño. Cuando ambos transistores están activadas, están tirando de ambas resistencias hacia la tierra, que representa la velocidad máxima en esa dirección. Otro dos transistores se utilizan del mismo modo para el cable de la izquierda.
Los otros cuatro transistores están conectados entre la tierra y una resistencia a la fuente de alimentación de 12 voltios. Estos transistores son normalmente en, y su terminal de drenaje está conectada a través de un diodo al cable delantero/al revés o de izquierda. Cuando estos transistores se dan vuelta apagado, el resistor ya no se tira hacia la tierra y el cable del joystick es tirado hacia el + 12v cable a través del diodo.
Esto es una manera fácil de dejar que un TTL de ocho bits (0 / 5V diigtal) controlador como el puerto paralelo del PC o 8 pernos de un Arduino controlan el joystick de la silla de ruedas analógica de 12 voltios. En la práctica (como se puede ver mirando el esquema y el circuito real) los valores de resistencia deben ser escogida para alcanzar valores que no hará que el cerebro de la silla de ruedas creo que hay un fallo en el joystick. (las resistencias 41K y 6,8 K son para sacar entradas de los transistores a su estado predeterminado, por lo que el joystick funciona normalmente cuando nada esté conectado en el lado de entrada de los tableros de interfaz).
Para determinar valores de resistencia, comience con una resistencia variable (un 100K ohmios es un buen comienzo) y conecte un cable a su terminal de izquierda y centro. Con la silla de ruedas con seguridad elevada para evitar el movimiento (o con el operador en el asiento con espacio para conducir alrededor) Conecte la resistencia variable mientras toma notas. Comience por conectar al izquierda y tierra y con su resistencia variable dado vuelta hacia la derecha. (se trata de la más alta resistencia, 100K ohmios). A continuación se muestra una imagen de una resistencia variable.
Cuando se activa la función izquierda/derecha en una silla de ruedas, que gira sobre su centro como un tanque. Asegúrese de que son tus pies en los estribos o podría salir lastimado.
Si la silla de ruedas no hace nada, gire la perilla a la izquierda hasta que la velocidad más baja deseada. Desconecte el resistor, medida con un medidor de ohmios y escribir todo (cómo fue conectado y lo que hizo la silla). Hacerlo de nuevo y encontrar la menor resistencia y la velocidad máxima deseada y escriba. Para esta dirección, se necesita una resistencia para cada uno de los dos transistores asociados - uno será el valor de la primera prueba (movimiento lento) y el otro será (consigue listo) el inverso del inverso del valor de la segunda prueba menos el inverso del valor de la primera prueba. Así, cuando ambos transistores están activados, la silla de ruedas ve la resistencia de la segunda prueba. Usted puede siempre a la vuelta de valores si no tiene el número exacto de la derecha. Estas resistencias y los dos siguientes se pondrán a los transistores de baja en el esquema, tirando el cable de la palanca de mando hacia la tierra cuando se activan los transistores.
Esta prueba debe repetirse con el hilo hacia delante / hacia atrás (se puede ir hacia atrás a alta velocidad). Tomar notas. Después se dio cuenta de esas dos resistencias, usted tendrá que probar las mismas pruebas pero esta vez, conectar la resistencia variable a través de un diodo al cable rojo, que tiene + 12 voltios del circuito de la palanca de mando. No dejes que este cable rojo haz cortocircuito a tierra, incluso por un segundo - podría freír tus aparatos electrónicos. Los resultados de estas pruebas serán los valores de resistencia para los transistores superiores, que tiran hacia el cable rojo como se aprecia en el esquema.
Una vez que ha determinado los valores de resistencia que desea utilizar, o incluso antes de eso, usted puede construir el tablero de la interfaz. Se utilizó "perfboard" y montado según la misma disposición física que se muestra en la imagen esquemática a continuación, salvo que utilizamos zócalos de 8 pines máquina que funcionan bien para empujar resistencias, por lo que pueden realizar cambios en la velocidad de movimiento de la máquina. También podría utilizar un montón de resistencias variable de 100K ohm...
Perfboard en WikiPedia:
http://en.wikipedia.org/wiki/perfboard
La terminal de la puerta de cada transistor va a uno de los ocho hilos del cable de entrada. Se utilizó un conector DB25 macho puesto que originalmente estábamos usando un puerto paralelo de la PC. Los cables de control conectados a los pines 2 al 9 y de tierra a los pines 18-25. Entonces tuvimos que hacer un adaptador para conectarlo a Arduino cuando substituyó el puerto paralelo en nuestra configuración. Puede saltarse el conector DB25 todo y solo cable directamente del Arduino a los transistores en el tablero de la interfaz mientras alambre encima de la manera correcta, que es más fácil sin el paso adicional de todos modos.

 de radio")











