Paso 3: El controlador del Motor
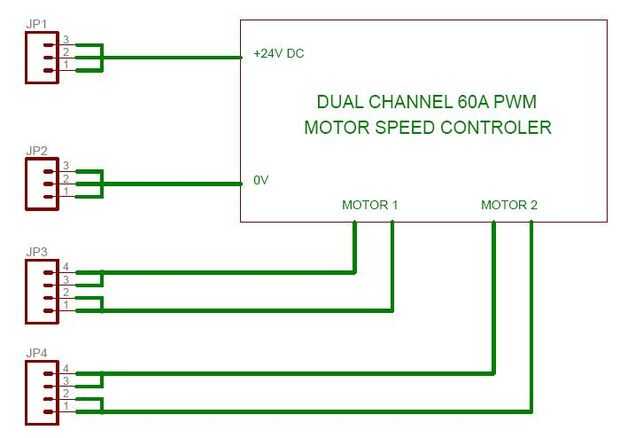
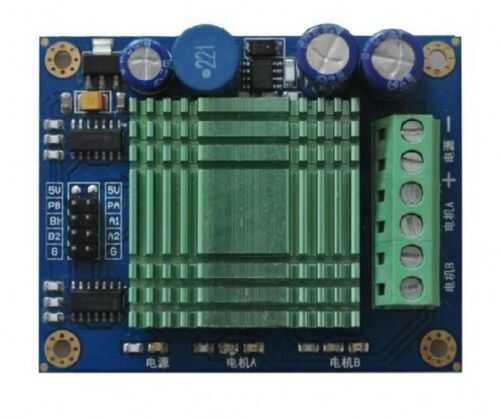
El regulador fue probado primero y para ser relativamente fáciles de controlar con un Arduino Uno. Alimentación a la unidad es a través de las baterías de 24V de la silla de ruedas, con conexiones a cada uno de los dos motores.
Dirección del motor de cada motor se realiza mediante dos pernos (A1 y A2 para el motor 1, B1 y B2 para el motor 2)
Velocidad del motor se controla mediante una señal PWM estándar a través de un solo perno (PA para el motor 1, PB motor 2)
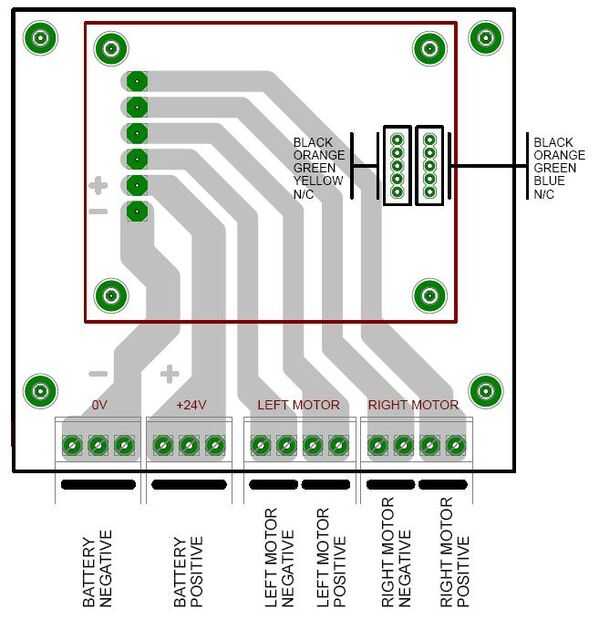
La unidad fue montada sobre un tablero de PC y las conexiones se realizan a través de terminales de alimentación doble.













