Paso 5: Cuerdas de marioneta analógicos en un mundo Digital
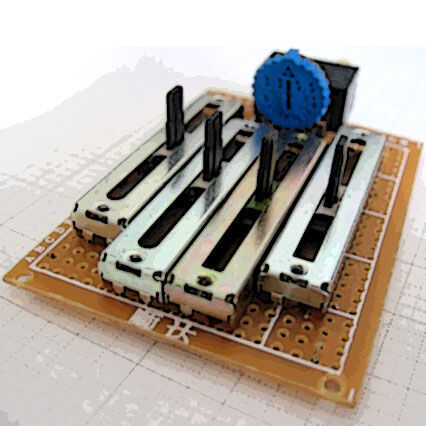
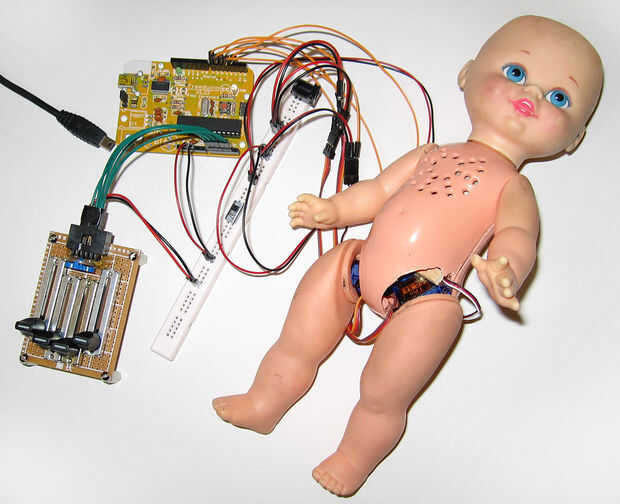
El primer paso es conectar los reguladores directamente con el Arduino para obtener la orientación correcta. Deben conectar los terminales positivo y negativo de la potencia de salida a cualquiera de los extremos de la botella y el pin del limpiador debe conectarse un análogo en el Arduino. Puede utilizar un multímetro para determinar la correcta conexión si no es inmediatamente claro. Buscas un voltaje que varía entre cero y cinco voltios al mover el control deslizante.
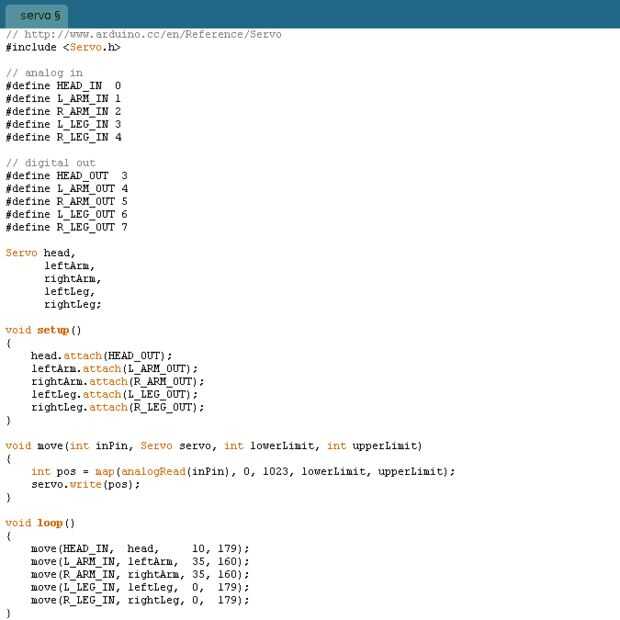
Utilizar el indicador de depuración en el proporciona código para conseguir salida serial que le ayudará a determinar la orientación correcta de la olla. Básicamente, usted apenas quiere un miembro para subir cuando el cursor se mueve hacia arriba. Es bastante fácil de obtener la orientación equivocada cuando soldadura pero no te preocupes si lo haces porque puede ser corregido a través del software.
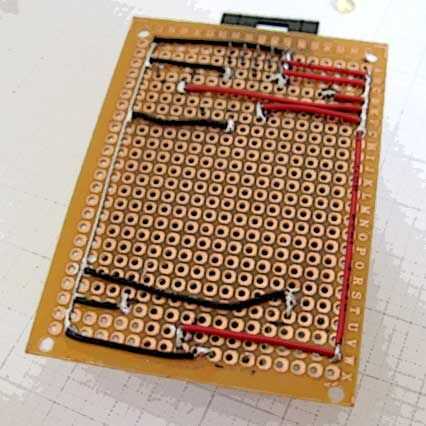
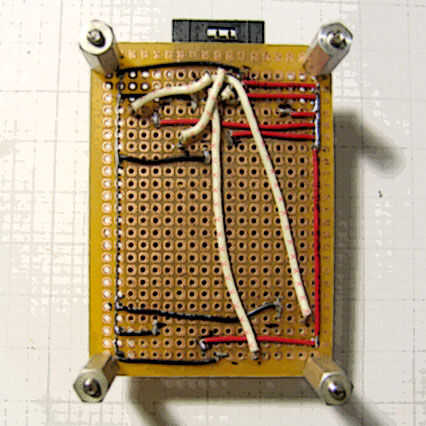
Todo para un perfboard soldadura una vez que estés satisfecho con el funcionamiento de cada maceta. Seguí todas las conexiones de positivo a un lado y los negativos al otro. Tomé una lectura de cada pin del limpiador una vez que este paso se completa para comprobar que todo era soldado correctamente. Entonces yo había soldado cada limpiador individual a uno de los pasadores uno del conector IDC.
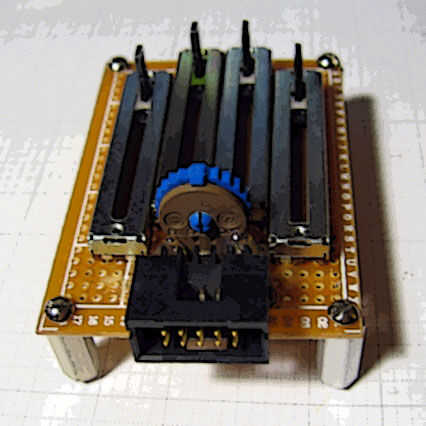
Cuando todo esté completo debe tener dos entradas para la energía y cinco salidas para cada uno de los botes. Escribir el bosquejo para el Arduino y conecte todo para comprobar que funciona.
Qué es el siguiente
-Conectar unos LDRs o sensores de movimiento para rastrear el movimiento de la cabeza para seguir.
-Añadir unos LEDs para los ojos.
-Hacerlo hablar.
-Todo en el cuerpo y hacerlo inalámbrico.
-¿Qué más?









")
")


