Un tiempo atrás escribí un par de instructables para creación de interfaz de usuario y el control de la base de Cybot usando comandos desde el teclado o desde un escáner de código de barras.
Enlaces a estos son a continuación:
Interfaz de usuario:
Control de código de barras:
Ambos emplean el lenguaje Scratch Arduino de 4 para el lado de control de software. Al final de estos que mencioné que quería llevar usar Bluetooth para controlar la base, esta guía cubre ese deseo.
Entrará en esto en un par de concursos
Si te gusta esto y posiblemente es útil por favor voten por él.
Gracias
El primero lo digo para cualquiera que desee probar Bluetooth control es que hay un montón de sitios en la web promoviendo el uso de las conexiones en RX/TX y hasta tiene videos de ella en la operación, lo que no dicen es cuánto les costó llegar a trabajar o cuántos números que tuvieron en hacerlo. Por esta razón finalmente probé la biblioteca Serial y define dos de los pines de arduino como las líneas de comunicación serial.
Para este instructable - (si se va a repetir) se necesita instalar la aplicación correspondiente para tu ordenador desde la arduin
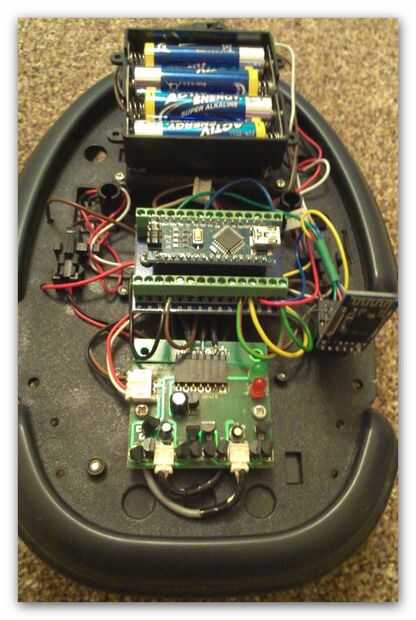
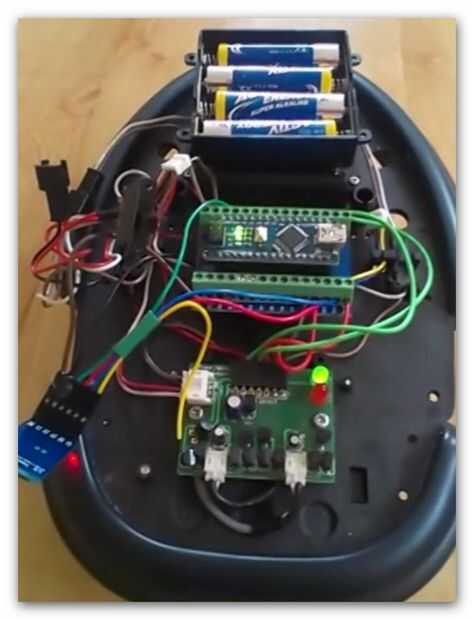
Usé un Arduino Nano v3.0 y un Consejo adicional que me dio las uniones atornilladas para facilitar el cableado eléctrico. el módulo bluetooth es de tecnología LC, todos de estos comprado en Ebay y donde increíblemente barato, creo que todos juntos vino a £11,00.
Usted también necesitará lo Cybot base - se pueden utilizar otros, pero esto elegí principalmente porque ya tenía, sino también porque ya tenía una placa de puente H para el control de los dos motores conectados.
Actualizaciones INSTRUCTABLE
He hecho un par de cambios / adiciones a la guía como sigue
- Seguridad relacionada - vea la sección de cableado - la tarjeta de motor estaba poniendo cachondo para cablear Para quitar el tema y explica en esa sección
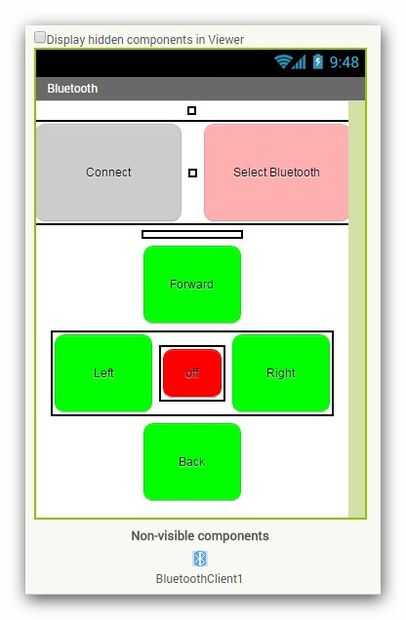
- Una aplicación de navegación básica y se agrega una sección para cubrir este

")

")
")






")

