Paso 5: Chasis de construcción
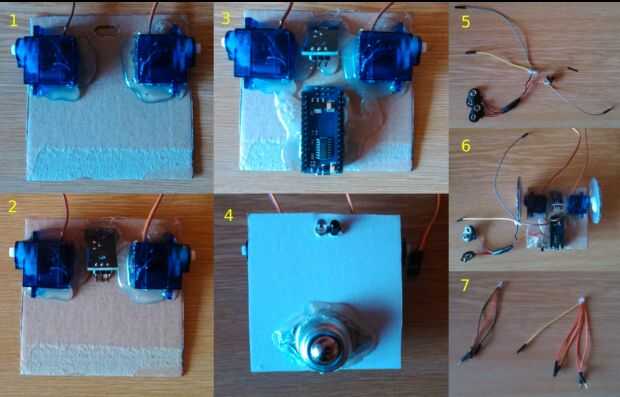
1. en el primer paso en la fabricación del chasis cartulina en la forma de un cuadrado y dos servomotores en los lados del palillo.
2. luego pegar el sensor de infrarrojos en el agujero preparado.
3. pegue el Arduino Nano en el medio.
4. en la bola de la rueda inferior palo robot.
5. dos 9V cable conector paralelo de la soldadura. Interruptor de la soldadura a la tensión. De puesta a tierra sacar dos conectores para ultrasonidos y sensor IR
6. pegue el interruptor en el chasis
7 ya que no utilizamos un protoboard, traemos a cuatro conectores de voltaje (servo de perno masculino de 2 x, 2 x hembra pin sensor) de VCC. De tierra traer a 2 conectores macho de GND para servo.
Ahora podemos probar chasis.
Código de prueba:





 (utilizando un Arduino y un Netbook)")
 Básicos Arduino Robot buscador de luz!")






