Paso 5: Montaje de los servos

#include
Servo myservoLeft;
Servo myservoRight;
int pos = 90;
const int LeftCalibrate = 90;
const int RightCalibrate = 90;
void setup() {}
myservoLeft.attach(9); se fija el servo en el pin 9 para el servo objeto myservoRight.attach(6);
}
void loop() {}
Calibrate();
Delay(25);
}
void Calibrate();
{
myservoRight.write(RightCalibrate); myservoLeft.write(LeftCalibrate); Delay(15);
}
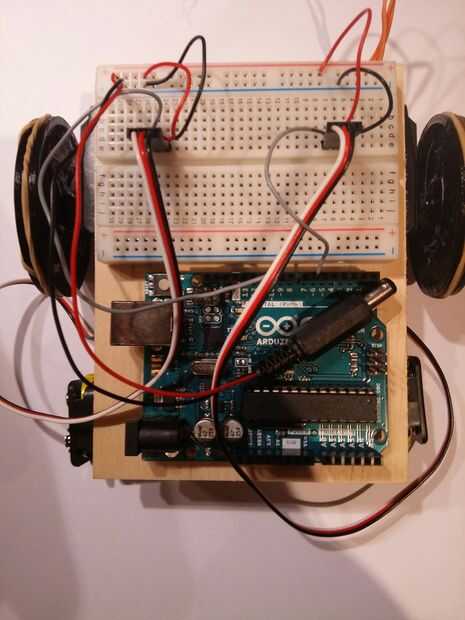
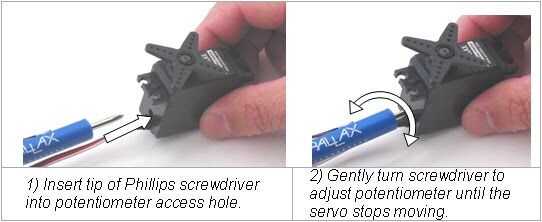
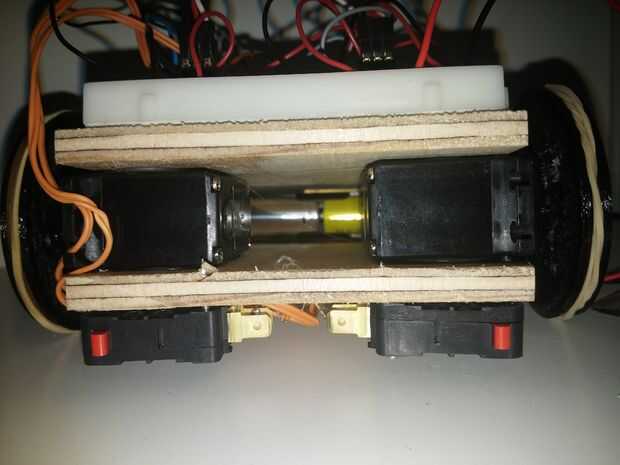
y un destornillador para llegar de los servos a 90 grados. Utilice un alambre para alimentar frome que el servo a la arduino y entonces el servo izquierdo señal 9 pin a pin y el servo derecho la señal al pin 6 a tierra. Luego use el código de calibración para calibrar los servos. Utilice hotglue para montar tus servos como se puede ver en las fotos. Añadir la energía de la batería a la placa y tomar el enchufe de CC del poder en el protoboard. Para sostener el soporte de la batería puedes usar algunos cortarla para conseguir un buen ajuste. Cuando el servo está calibrado y montado entonces puedes montar las ruedas y tomar un cerca de goma de la rueda para conseguir agarre.


 Básicos Arduino Robot buscador de luz!")








