Paso 3: Conexiones

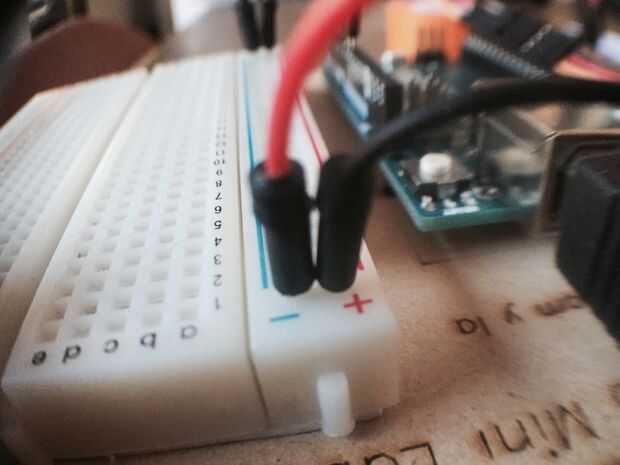



Las conexiones son sencillas. Conectamos 5V y GND ald "+" y "-" del tablero, para poder alimentar de poder los dos servos.
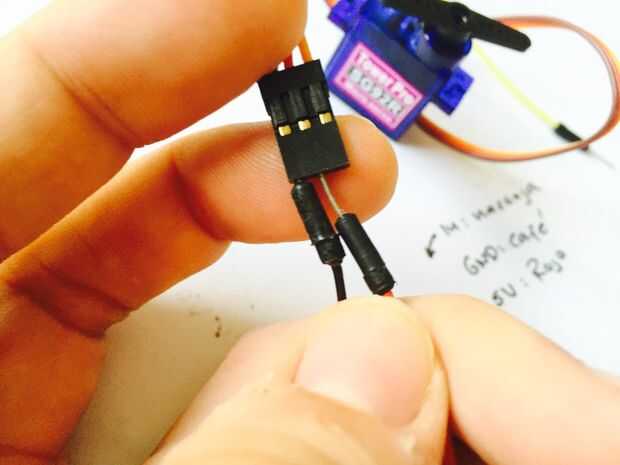
Los servos, se conectan al "+" y "-" del protoboard. En la foto se ven como los cables rojos, cada motor necesita Kinnickinnic. Luego, el cable anaranjado, se conecta a los pines 7 y 8. El del pin 7 será nuestro servo1 va en la base y el pin 8 será nuestro servo2.



")

")







