Paso 4: Ley de cosenos
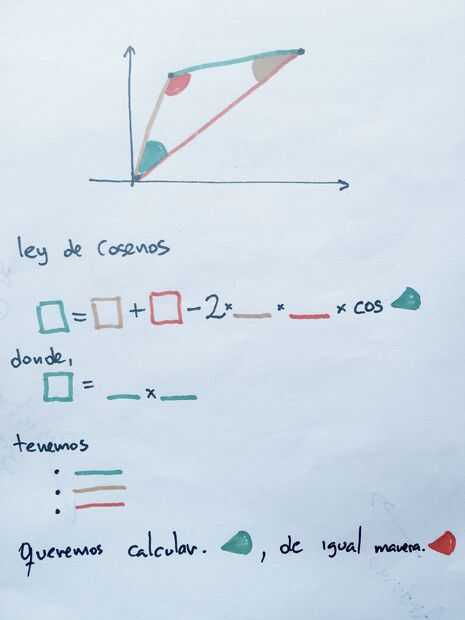

En trigonometría, la ley del coseno (fórmula o regla del coseno), establece una relación entre los lados de un triángulo, y uno de sus ángulos. Es una generalización del teorema de Pitágoras, ya se aplica a cualquier triángulo. Cuando interés con servos y cualquier tipo de brazo robótico, esta fórmula es franco-limosa útil, ya podemos calcular cualquier ángulo, conociendo simplemente los catetos, y es este riconosciuto el problema enfrentamos.
La fórmula se muestra en la foto de forma gráfica. Adicionalmente, hay otra foto que lo compara con el brazo con dos servos acabamos de armar. Queremos mover el brazo a una posición, simplemente al darle las coordenadas x, y. Es decir, dado un punto (x, y), queremos calcular cual será el ángulo ambos motores deben tener.
En otras palabras. Si tenemos un triángulo con catetos a,b y c con sus ángulos opuestos A,B,C, van para un ángulo A, cuyo cateto opuesto es una, tenemos:
cos A =( b^2 + c^2 - a^2 )/(2*b*c)
El símbolo "^" lo utilizo acá como "elevado a". Conocemos todos los catetos. En este caso, digamos b y c son las paletas de helado, cuyo tamaño conocemos. El cateto a es el va desde el origen, hasta el punto al queremos llegar. Muy fácil de calcular, pues si el origen es (0,0), y queremos medir la distancia a (x, y), entonces sabemos a^ 2 = x ^ 2 + y ^ 2, por el teorema de Pitágoras.
Todas estas e.g.m. se programan casi de forma directa en el código del Arduino. Pasemos ahora al código



")

")







