Paso 2: Diseño básico
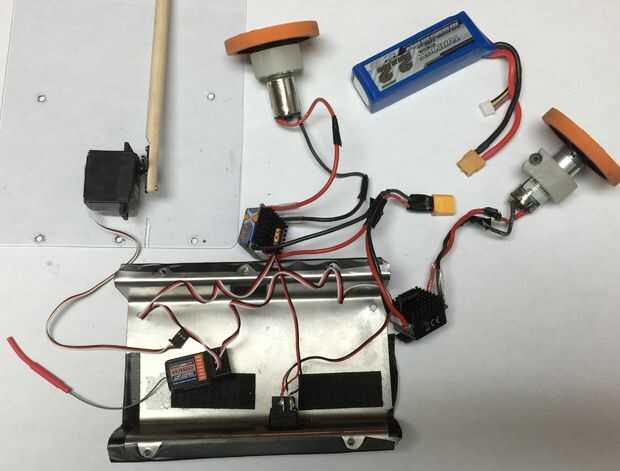
Para mantener las cosas simples a seguir el flujo de electricidad, mientras que viaja a través del bot. A partir de la batería azul en la parte superior derecha que la energía viaja a través de la desconexión eléctrica amarillo. La desconexión es útil para quitar fácilmente el poder del sistema y también para cargar la batería. Después de que la eléctrica Desconecte la alimentación eléctrica se divide a cada uno de los controladores de velocidad eléctrico (piezas cuadradas con las aletas de aluminio extruido en la parte superior). La ESC que elijo son con cable para un interruptor de alimentación hasta dos controladores de velocidad se conectan al simple interruptor de encendido/apagado. El receptor, en la parte inferior izquierda, metros el poder de los controladores de velocidad basado en la señal del transmisor. En adelante completo el receptor abre cada controlador de velocidad para flujos de potencia para cada motor.
Decidí que mi bot un poco más interesante, así que añadido que un servo accionado la palanca. El servo derecho conecta a los receptores y obtiene su energía de eso. Si te querías ir muy fácil podría utilizar servos de alta velocidad como los motores, pero nunca he probado ese camino.













