Pequeños robots con ruedas cuatro son diversión para construir y jugar con, pero ofrecen un nuevo conjunto de desafíos para el principiante. Con la adición de dos motores más, añades varios problemas, uno de ellos más energía se necesita. Esto puede significar más o más baterías o al menos, mejor. A continuación, su elección del regulador del motor es mucho más importante. No quiero un poder thieving puente h tomar cualquier energía más entonces que realmente necesita. Dicho esto, no quieres uno que no puede suministrar la corriente necesaria para todos los motores tampoco. En este artículo, trataré de una dirección de todas estas cuestiones con un Rover 4wd llamado JR-001.
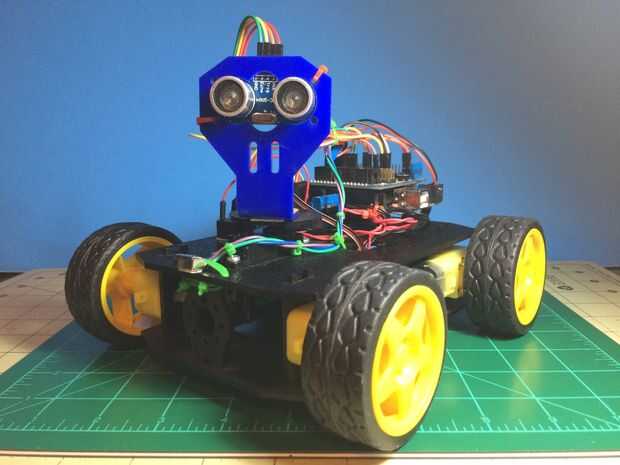
JR-001 es un rover simple con dos modos de controlar mediante un interruptor. Modo uno es sólo la búsqueda de obstáculo habitual- y evitar. Modo de dos es un modo de keep-away tipo o lo que yo llamo "Fuerza". Con este modo, el bot se mueve hacia adelante y si pones la mano delante del sensor reversa y girar en una curva mientras se mueve hacia atrás. Con él, usted puede fingir que eres un Jedi con la fuerza de su lado, empujando el bot!
Los dos modos solo ayudan a servir como una forma de demostrar un método simple para controlar lo que hace tu bot internos y externos al código. Debo decir que mi principal objetivo aquí es ayudarle a que conseguir un bot 4wd pequeño con pocas preocupaciones.
Qué se cubre en la construcción de este robot:
- Consideraciones de alimentación para un robot de 4 ruedas
- Puente de H necesario para obtener más potencia y menor cantidad de caída de tensión
- Conseguir potencia a las ruedas sin girar hacia fuera y ganando más tracción como spin-up









")


 - Arduino basado (GRBL)")
