Paso 12: Bot cable motor/problemas
Como dije antes:
VERIFIQUE TODOS LOS CABLES!
Si usted necesita obtener su motor cableado correcto, puede Agregar un retorno en la parte superior de la función de bucle (). Esto permitirá que tiempo para cambiar los cables del motor alrededor. Hacer esto hasta que las ruedas del robot ambos van hacia adelante. Una vez, debe ser todo.
ejemplo:
void loop)
{
retorno; Volver aquí y subir para los cables de equipo de prueba.
Leer los sensores cada 5ms y actuar en consecuencia.
Si (sensorrd.check ()! = 1) {}
retorno;
}
.
.
.
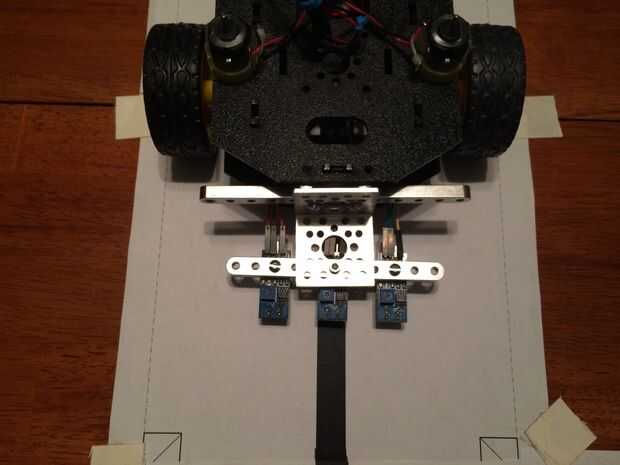
A partir de la siguiente línea de bot:
Antes de poner el bot, lugar donde el sensor del centro está en la línea y la izquierda y la derecha es la línea. Una vez que la energía es uno, el código hará una calibración rápida y sencilla. Ver el código para obtener más información.






")
")





