Paso 4: montar las piernas

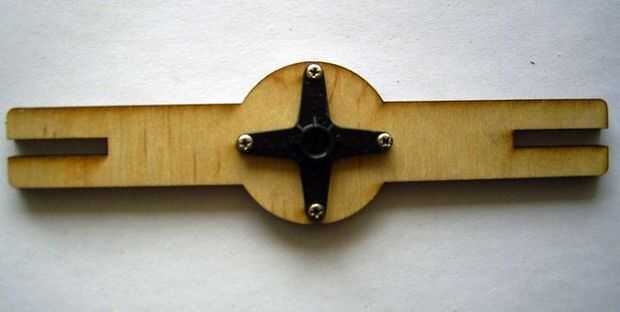
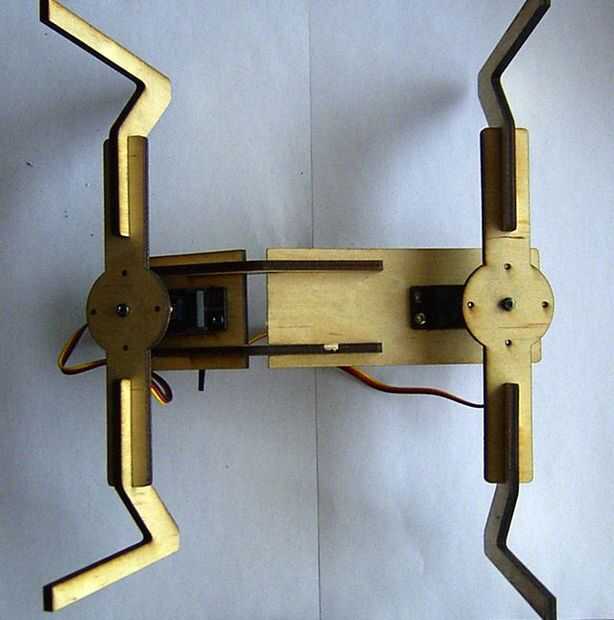
No apriete los tornillos m3 central todavía. Primero es necesario descubrir posición del servo central en el software. Después de centrar el servo de (en arduino código con una gama de servo de [0-180] significa escribir el valor '80' en el servo) puede montar las piernas en un ángulo recto.



")



")
")



