Paso 6: Conecte los cables


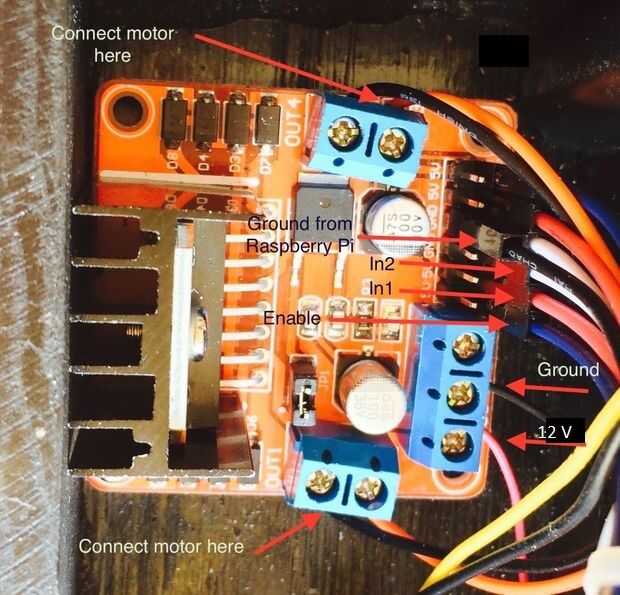
Cada regulador del motor tiene dos circuitos idénticos por lo que puede manejar dos cosas. Uno de los controladores de motor se utiliza para los motores de la pista. El otro controlador de motor se utiliza para el motor de la garra y la iluminación LED. El regulador del motor utiliza una entrada A y B que establece altas y bajas en ejecutar el motor adelante, revertir o detener. Estoy usando modulación de anchura de pulso (PWM) en los pernos permiten controlar velocidad del motor. Los motores en el robot fueron diseñados para funcionar a 3 voltios. Estoy usando 12 voltios pero estoy encendiendo y muy rápidamente por lo que el voltaje promedio es mucho menor.
Lista de todos los pines GPIO del código python
LeftMotorTrackA = 3
LeftMotorTrackB = 5
RightMotorTrackA = 7
RightMotorTrackB = 8
MotorGripperA = 10
MotorGripperB = 11
GripperLED = 12
CameraServo = 13
LeftMotorTrackEnable = 31
RightMotorTrackEnable = 33
GripperEnable = 35









")



