Paso 3: Paso 3: la prueba.
Entonces enciende el Arduino, el escudo Arduino + CANBUS es ahora estar solo y no necesita un pc pero apenas la dejé conectada para conseguir energía del puerto USB.
Entonces connectr el ELM327 USB, en Administrador de dispositivos Asegúrese que Puerto pertenece a la ELM327 comprobar porque ahora tienes 2 puertos com puerto de COM del Arduino y el ELM327.
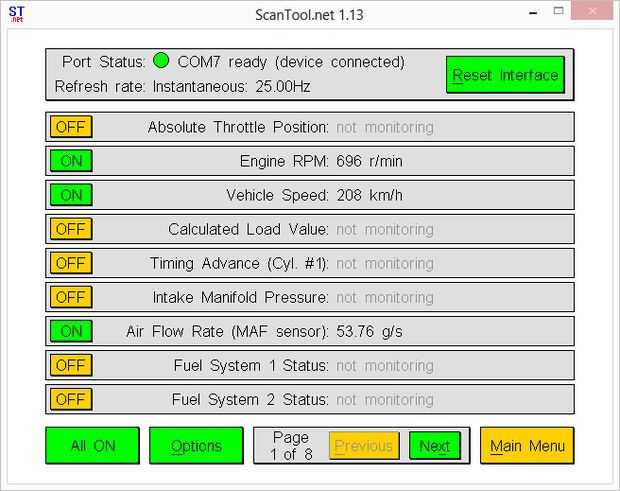
Iniciar un programa de windows de diagnóstico OBD es decir ScanTool.net luego que controlar las RPM.
El simulador de OBD no es liso debido a su programado para generar aleatoriamente datos "Válidos", es decir, el wil RPM salta aleatoriamente de decir 5 RPM a 800 RPM a 20 RPM y 1800 RPM ect ect, he hecho notas en el código de Arduino, su fácil lectura y no es compatible con todos los datos de PID pero ciertamente puede Agregar a él. Mirando algunos de los PID estándar de Wiki y siguiendo la metodología de "Mi"
http://en.wikipedia.org/wiki/OBD-II_PIDs
También puede si desea construir en una caja luego añadir unos botones para modificar las variables asignadas a la función de generador de aleatorios, no necesita suave valores, justo como yo soy capaz de probar mi prototipo de ScanTool de Arduino.





)")





")
