Paso 6: Mapa y calibrar canales
Do como se muestra en las imágenes.
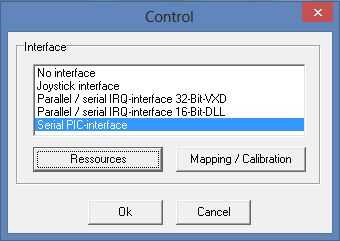
En FMS, haga clic en controles > controles analógico
1. Seleccione interfaz Serial PIC
Esto seleccionará TX & Arduino como nuestro dispositivo de entrada.
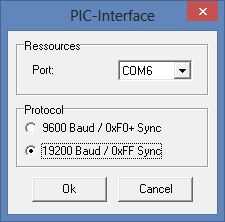
2. Haga clic en recursos puerto y baudios tarifa fija.
Puerto COM varía pero tasa de baudios es 19200, tal como se establece en Arduino.
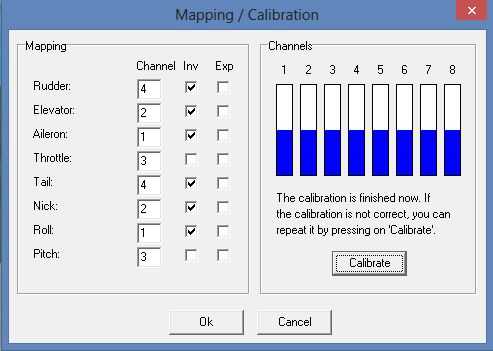
3. Haga clic en asignación y calibración.
4. mapa de canales de TX
Los ajustes del canal de RCB6i se muestran en la imagen.
Nota: Mantener la mezcla OFF.
Si tienes un TX diferente, consulte su manual y cambiar a los canales correspondientes.
Por ejemplo, el manual de RCB6i Estados
CH 1 - alerón
CH 2 - ascensor
CH 3 - válvula reguladora
CH 4 - timón
Cola, Nick, Roll y Pitch son los ajustes para helicópteros.
Corresponden al timón, elevador, alerones y acelerador en planos.
Necesitará invertir tu canal y ajuste ON exponencial basado en la configuración de su transmisor.
5. calibrar canales
Haga clic en calibrar y siga las instrucciones cuidadosamente.





 a ThingSpeak con un Arduino, mediante cable o WiFi (ESP8266)")







