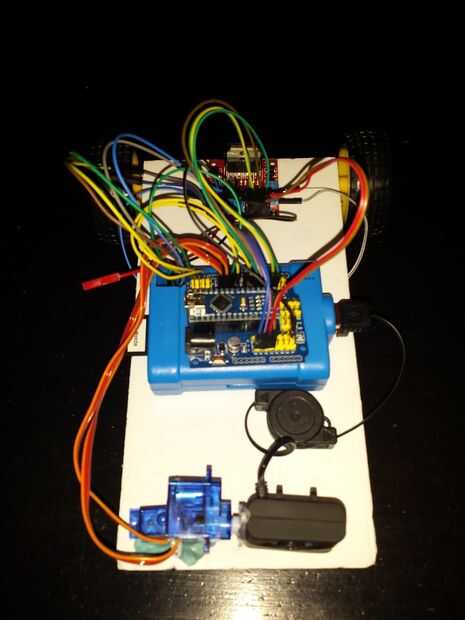




Aquí está otro rover de exploración, construido en 1 hora o menos, sin necesidad de programación. Todo lo que necesitas está en la caja! Que le da la base para construir y mejorar a su propio rover.
RaspberryPi con adaptador usb wifi, webcam usb, servidor web (apache + php) y un pequeño administrador de GPIO (WiringPi).
Arduino para control de motores y servos de dirección de la webcam.
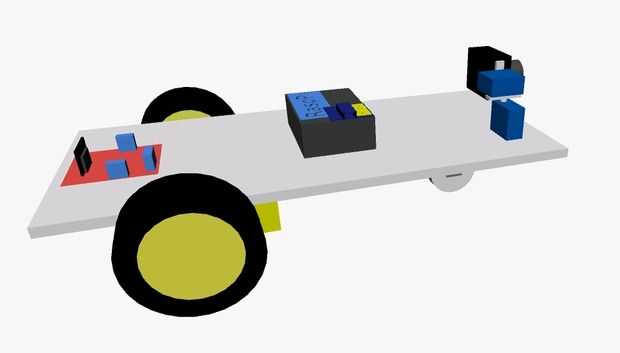
Todo instalado en un tablero (madera, cartón, foamcard,...)
.
Lo que usted necesita:
-1 arduino nano o compatible
-Escudo 1 sensor para arduino
-2 servos RC
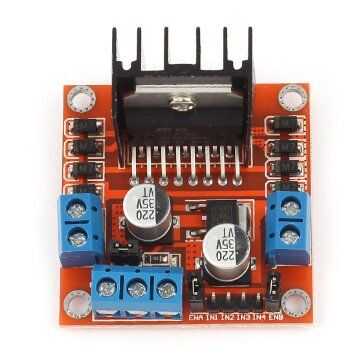
-1 puente H dual
-2 kits de rueda (rueda + motor)
-1 rueda
-1 frambuesa pi con raspbian instalado en la tarjeta SD
-webcam 1
-1 adaptador del usb wifi
-Banco de potencia 1 con 2 salidas
-1 batería de 9 voltios
-Jumper cables
-Caliente el pegamento / tachuela azul / cinta...
.
.
Configurar el wifi
Conecte el adaptador usb de wifi y configurar la interfaz wifi en el Raspberry Pi:
.
editar el archivo interfaces para agregar/modificar sección wlan0:
sudo nano /etc/network/interfaces
auto wlan0
hotplug permite wlan0
iFace wlan0 inet dhcp
WPA-ssid "Su-red-WIFI"
WPA-psk "Contraseña de su WIFI"
sudo /etc/init.d/networking stop
sudo /etc/init.d/networking start
.
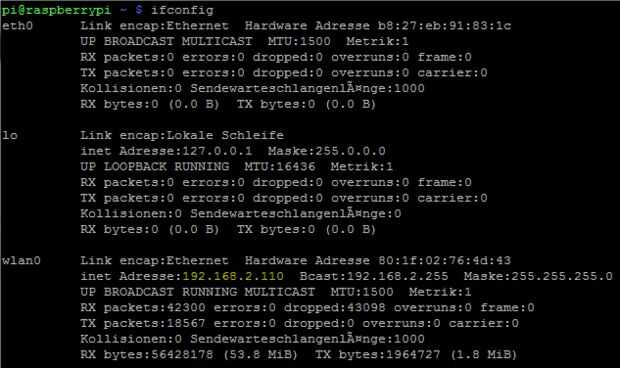
Ahora, podría quitar el cable de ethernet y controlar interfaces
ifconfig
El resultado debe ser el mismo que se muestra en la imagen (imagen 2), con una dirección ip diferente
Para obtener sólo la dirección IP:
hostname -I
.
.
Hagamos que comenzó...
Para este tutorial, todo el crédito va para el electrón libre:
No dude en enviar sus propias fotos, mejoras o comentarios.
![Sin embargo, otro de tercera mano para soldar ayuda. [con extractor de humos incorporado]](https://foto.askix.com/thumb/170x110/d/5b/d5bac727977e845520a425f58be7ca19.jpg "Sin embargo, otro de tercera mano para soldar ayuda. [con extractor de humos incorporado]")
")



")
")

 Un trabajo en progreso")

 Chasis de plataforma-un Robot robótica Arduino DIY de piezas de repuesto")

 Manera de hacer su propio Nerf dardos")
