Paso 4: montaje
Mirar el cuadro proporcionado por parte de orientación.
- Compruebe el panel de control para ver si un programa puede cargarse utilizando el IDE de Arduino. Necesitaba para quemar el bootloader de Arduino.
- Presione el pasador en su lugar
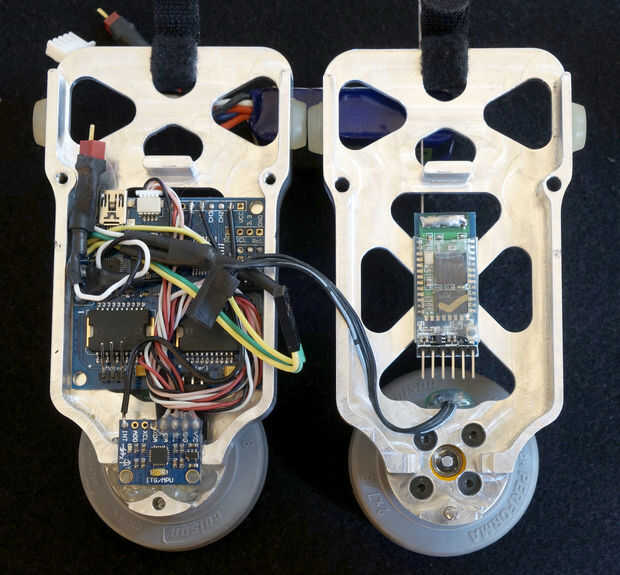
- Fije el panel de control usando cinta doble cara espuma en las webs del cuerpo de aluminio
- Fijar los motores sin cepillo para el cuerpo con los cables en la parte superior
- Pegamento caliente la IMU en su lugar asegurándose de que quede bien empotrada en las fichas de aluminio y el IC es situado en línea con los ejes de motor
- Crear una antena de onda completa (~12.5cm) del alambre de piano para el módulo Bluetooth y conectar así sucesivamente fuera del cuerpo (taladré un agujero pequeño a través del módulo que permite a la antena salir de la parte trasera y proporcionar más apoyo)
- Conecte el módulo de Bluetooth usando la cinta doble cara espuma
- Restablecer los valores predeterminados en la HC-05 usando comandos y las instrucciones. Mi módulo Bluetooth tenía un pulsador en lugar de un pin de "Llave", que debían realizarse durante el encendido y programación. El nombre del dispositivo y la contraseña se restablecen y la velocidad en baudios se establece en 230400.
- Conecte el Bluetooth TX a RX, RX Bluetooth a través de un divisor de tensión para TX para reducir el voltaje a 3.3v y suministrar la energía necesaria
- Acople un conector de batería (he añadido un 2amp fusible en línea para ofrecer una protección un poco más)
- Conexión de la IMU y los motores a la Junta de control (que vinieron con conectores adjuntos)
- Fije un indicador LED al pin A1 con una resistencia de ohm k 1 (une dos y les señaló la parte inferior del robot)
- Otro material opcional: tiras de Velcro en la parte superior para mantener la batería en, pegamento caliente los cables para el alivio de tensión, topes de goma para proteger el piso
- Ambas mitades ahora deben encajar y mantenerse en su lugar utilizando los dos tornillos #6-32







")





