

Este es un proyecto de electrónica primavera 2014 en Pomona College, creado por Andreas Biekert y Jonás Grubb. Gracias profesor Dwight Whitaker, Tony Grigsby y el Departamento de física de Pomona.
Nuestro objetivo con este proyecto era crear un cardán de 2 ejes sin cepillo controlado únicamente por un Arduino Uno con el aporte de un acelerómetro/giroscopio. Un balancín es un sistema de estabilización de cámara que utiliza los motores para corregir el movimiento de cámara no deseados. El objetivo es crear perfectamente constante, aunque suaviza cualquier baches es un referente primera razonable. "Sin cepillo" se refiere a motores sin escobillas que explicaremos más sobre más adelante. Todos los otros proyectos de cardán encontramos son controlados mediante fabrican tableros de control cardán así que hemos querido abordar el proyecto desde un nivel más fundamental. Nuestra esperanza era crear control de cardán sin cepillo sin este tipo de Junta, sino más bien usando la Arduino Uno de uso más general.
Vamos a tener que ser por adelantado; nunca tenemos el cardán que estábamos buscando. Sin embargo, nos aprender mucho sobre cómo debería funcionar el dispositivo, por lo que hemos escrito nuestros pensamientos en mejoras y direcciones a seguir con el proyecto. Esperamos que esto sea por lo menos un buen recurso para un punto de partida. Háganos saber si usted tiene alguna pregunta o sugerencia de mejora.
Entre aprender a controlar los motores sin cepillo y el interfaz con el acelerómetro nos consultar bastantes fuentes para este proyecto. Nos hace referencia a material y fotos de este proyecto, que sirvió como la Fundación para el control de motor sin escobillas. Nuestro código se basa pesadamente en el proyecto mencionado control del motor y esta librería I2C con código de ejemplo para un chip de MPU6050. ¡ Muchas gracias a ambos proyectos por darnos la dirección de nuestros esfuerzos!
Hay varias maneras de conseguir las piezas para este tipo de proyectos. Naturalmente, uno de los componentes del principio es el Arduino Uno.
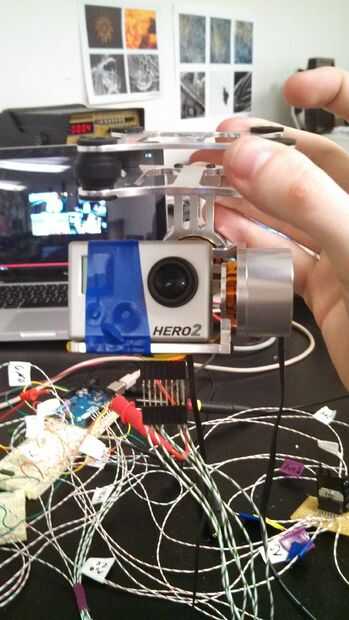
Compramos un marco y un motor sin escobillas en Amazon: marco y motores sin escobillas. Es probablemente posible a máquina o imprima su propio marco, pero estaban más interesados en la parte electrónica de este proyecto, así que nos fuimos con la ruta más rápida de comprar simplemente el marco prefabricado.
También compramos nuestro acelerómetro de Amazonas: acelerómetro/giroscopio. La GY-521 breakout Junta es significativamente más barata que cualquier otro MPU6050 modelos encontramos, pero trabajó muy bien para nuestro proyecto. Sin embargo, que lograron romper uno y tuvo que pedir otra. Todavía no estamos seguro de que no fue culpa nuestra.
Utilizamos dos Mauser 511-L298 h-puentes (con disipadores de calor) para controlar los motores---más sobre esto más adelante. Son capaces de manejar las tensiones y corrientes necesarias para conducir los motores por lo que pueden mover el marco y la cámara superior.
Algunos otros pequeños componentes que se utilizaron fueron resistencias de 2.2K dos, tres condensadores de 0,1 μF y un montón de cableado :)




 con Arduino")





")

