Paso 2: Implementación de Control de Motor sin escobillas
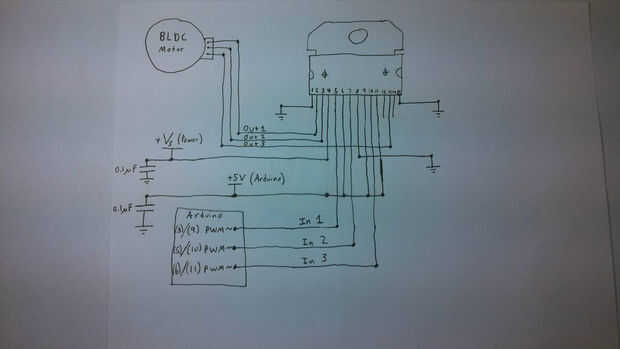
Introducción al puente h para controlar los motores nos permite el movimiento bidireccional que el cardán requiere y también permite caminar muy suave de la posición del motor. El puente H esencialmente cambia el signo en uno de los electroimanes para que tengamos una alta, una media y baja tensión. Como se mencionó en la introducción, se utilizan L298 h-puentes, que tienen 15 pines. Nos conectados cada uno de ellos como se ve en la imagen de arriba. Aquí está la hoja de datos.
- Pin 1: tierra
- : 2 Motor patillas 1
- : 3 Motor patillas 2
- Pin 4: Externa voltaje de suministro (poner un capacitor de 0,1 μF a tierra)
- Pin 5: Arduino PWM Digital salida (pin 3 o 9)
- PIN 6: + 5V de Arduino (poner un capacitor de 0,1 μF a tierra)
- PIN 7: Arduino PWM Digital salida (pin 5 o 10)
- Pin 8: GND
- PIN 9: + 5V de Arduino
- PIN 10: Arduino PWM Digital salida (pin 6 o 11)
- PIN 11: + 5V de Arduino
- Pin 12: No conectado
- : 13 Motor patillas 3
- PIN 14: No conectado
- PIN 15: GND
Nuestra fuente describe un esquema inteligente de aproximar una señal sinusoidal a los motores. Construyen una matriz de 48 valores entre 0 y 255 que representan los valores de la función seno en incrementos iguales. Empiezan cada electroimán estado A, B, y C 16 valores aparte de uno otro, que se divide el período de la función en tercios o, en otras palabras, la fase cambia de puesto los Estados por 120 grados. Entonces, ellos simplemente incrementan valor de cada estado de la matriz para que los Estados del ciclo a través de la onda de seno con cada ciclo del programa. El resultado es una rotación muy suave en el motor, aunque es un poco velocidad limitada por la capacidad física del motor para mantenerse al día con las señales de Arduino.
Utilizamos el mismo esquema PWM seno matriz como nuestra fuente, que permite incrementar aunque una aproximación numérica de la función seno en un número determinado de pasos en el período. En nuestro caso, duplicamos el número de valores en la matriz de 48 a 96 por lo que más precisamente podríamos controlar el motor. Esto es porque nuestra aplicación de cardán no necesita el motor para hacer rotaciones completas, bueno, alguna vez; sólo tenemos que ajustar la posición de la cámara contra el movimiento de la base. Observaciones rápidas sugieren que nuestro esquema permite que el motor de paso en pasos de 0,2 grados a la vez.
Es importante tener en cuenta que en su mayoría una forma improvisada de control de motores brushless. En un momento dado, queremos una corriente alta de electroimán, una baja y una en un estado de alta impedancia , que se aproxima a ni alta ni baja. En nuestro caso, el estado de "alta impedancia" deja realmente actual run off a tierra, que genera una cantidad significativa de calor en el motor. Un lugar definido para la mejora es que los motores se caliente en el caso de operación de largo plazo (por ejemplo sobre uno o dos minutos).
Otro peligro con nuestra aplicación es en el caso que el motor falla físicamente o sobrepasa uno de los pasos, que pueden ocurrir dados el importante peso del marco y cámara en relación con el esfuerzo de torsión del motor. En este caso, nuestro programa es consciente de que el motor no está sincronizado con las señales y ciclos a través de la onda senoidal de una vez antes de "coger" el motor y continuar normalmente.




 con Arduino")





")

