Paso 13: Conectar el controlador con RC
![]()
![]()
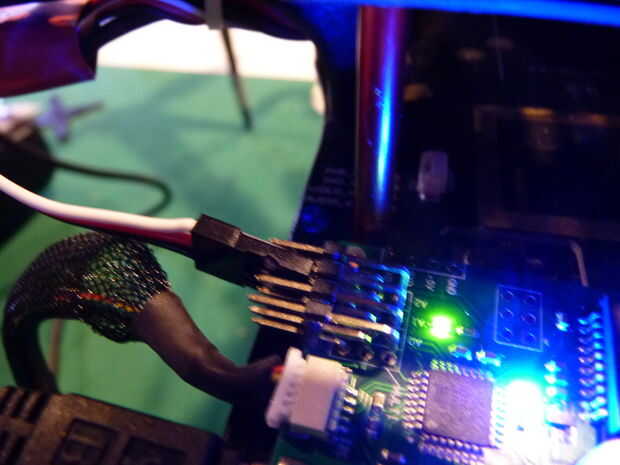
Para el marco de los disparos aún mejor, el mando a distancia puede utilizarse para controlar el pitch y el rollo de la cámara. En la mayoría de los casos sólo el eje de la echada es de interés para inclinar la cámara hacia abajo o hacia arriba. Puede utilizar el mismo control remoto y el receptor que utilizas para controlar tu robot, o más interesante puede conectarlo a un sistema secundario que es controlado por el hombre de la cámara.
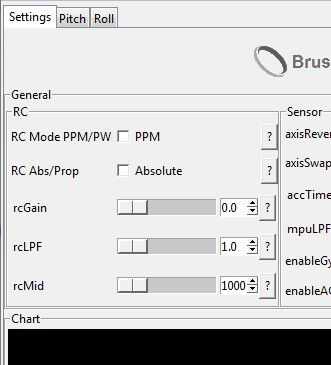
La sensibilidad y el modo (absoluto o proporcional) del RC de entrada pueden configurarse mediante la interfaz gráfica.
Puertos
A1 es para el eje de la echada (cámara de inclinación hacia arriba o hacia abajo)
A2 es para el eje del rodillo
Asignación de PIN
Pasador inferior es (hacia fuera-más en el tablero)
Medio es 5V
Parte de arriba es señal de




")



 con Arduino")


