Paso 1: Recoger tus piezas


El tablero de regulador:-
1. cualquier modelo/clone placa Arduino.
2 433MHz o el módulo de 315MHz (ambos funcionan del mismo modo) par Tx y Rx (Link aquí)
3. un tablero para el teclado del controlador (no es necesario si usted está usando una computadora para controlar el bot).
4 interruptores de botón X 5 (otra vez no es necesario si usted está usando una computadora para controlar el bot).
5. conexión de los cables.
6. 9V batería para alimentar el Arduino en el extremo de Tx.
7.A 17cm largo protoboard el cable de la antena para Tx y Rx.
La Junta de receptor:-
1. cualquier placa de modelo/clon de Arduino.
2. la parte de Rx del par theTx/Rx (enlace en el paso 2 anterior).
3. protoboard y conexión de los cables.
4.12V batería para motores de potencia. (En el video he usado una 12V AC a DC adaptador)
5. 100uF electrolítico Caps X 4.
6. chip de controlador de motor L293D X 2 (cada chip controla 2 motores bidireccional... Así que si quieres hacer un bot con ruedas 2 se necesita solo 1 chip L293D).
7. 0.1uF cerámica tapas X 12 (3 por cada motor)... para eliminar el ruido entre el controlador y motores.
8. una batería de 9V para alimentar el Arduino en el extremo de Rx.
Nota:- Puede omitir el paso 5 y 6 Si tienes un escudo del motor... aunque el código será necesario algún ajuste entonces!
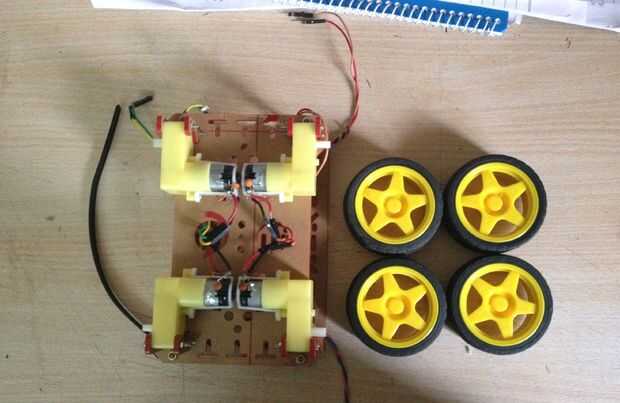
Chasis robot y transmisión:-
1 DC motores de X 4
2 chasis robot
3. ruedas X 4
Nota:-utilicé este chasis robot... vino con las ruedas y motores
Ahora a la construcción...



")






")

 con Arduino y Android(bluetooth)")
