Paso 2: El transmisor: parte 1:-controlar el Robot con la computadora
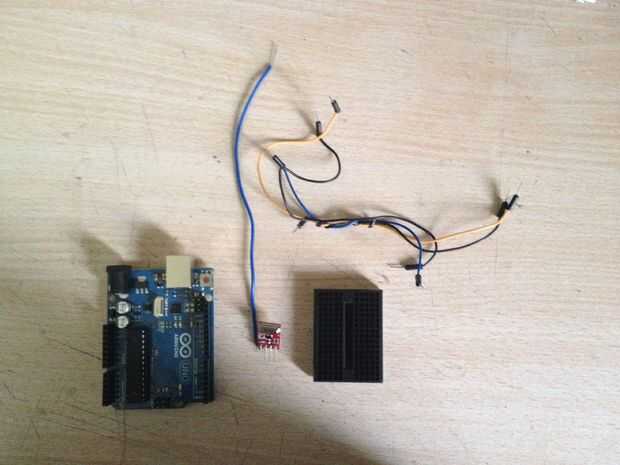
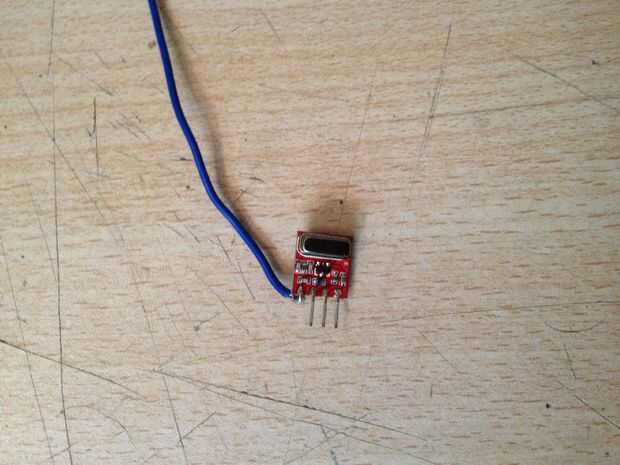
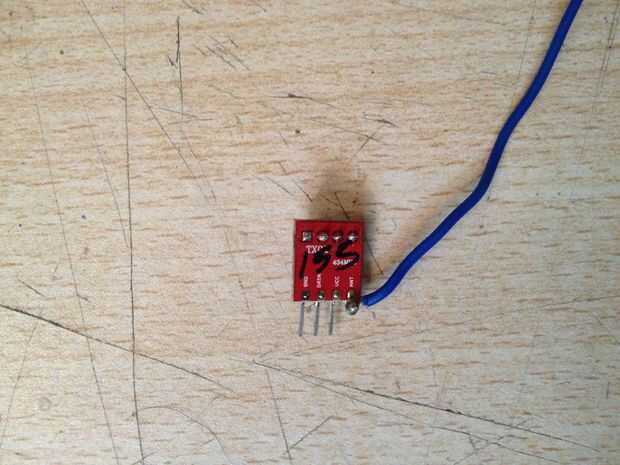

El transmisor es el módulo más pequeño tiene 4 pines:-
(1) Hormiga---> antena
(2) VCC---> alimentación... en este caso 5v de Arduino en el final de Tx.
(3) Datos---> pin de datos... transmite los datos en bytes.
(4) Tierra---> conector de tierra... conectada a tierra de Arduino.
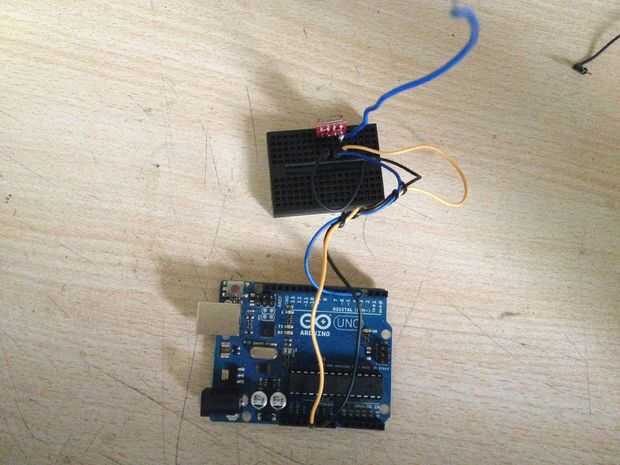
Primera soldadura de la placa de base sólida de 17 cm (unos 13cm para el módulo de 315MHz) cable con el conector Ant en el módulo Tx... la antena adicional aumenta el alcance de la comunicación y mejora el rendimiento en el interior.
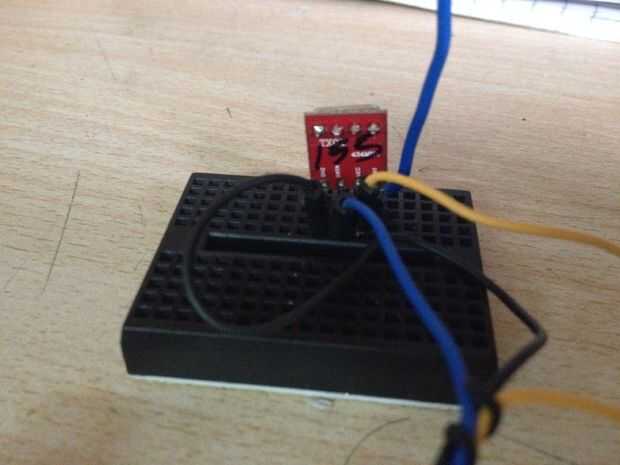
Si no quieres soldar la antena directamente siempre se puede conectar en el protoboard.
En este paso aprenderás cómo controlar el bot a utilizar el ordenador.
Puede tener una mirada en el paso 3, que muestra cómo controlar el bot utiliza un controlador de la placa.
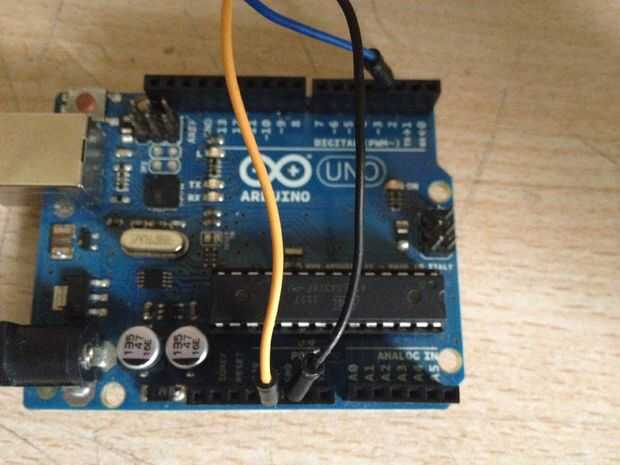
Conexiones:-
Estos son la conexión entre Arduino y el modulo de Tx.
Tx Arduino
Vcc-----------------------------------> 5v pin
Tierra---> Gnd pin
Datos---> Pin Digital 3
Código:-
En primer lugar usted necesita descargar la biblioteca VirtualWire... esta biblioteca hace que estos módulos de codificación para el Arduino fácil.
Instrucciones de descarga e instalación se proporcionan aquí
Del código de trabajo:-
El código de aceptar entradas del usuario (f, b, r, l, s) a través del monitor serial y luego usa las declaraciones Switch-Case para determinar qué comando es enviado por la Tx. es decir, delante, detrás, izquierda, derecha, o detener.
El código se adjunta a continuación en un archivo .txt... solo pegarlo en una nueva ventana en el IDE de Arduino.
Movimiento...



")






")

 con Arduino y Android(bluetooth)")
