Paso 3: El transmisor: parte 2:-mando a distancia de la Breadboard
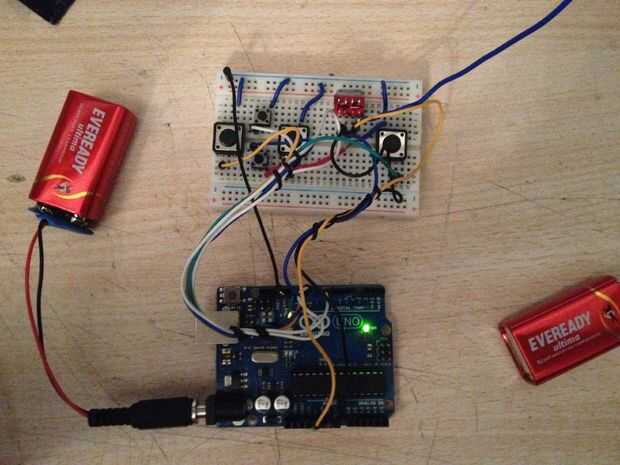
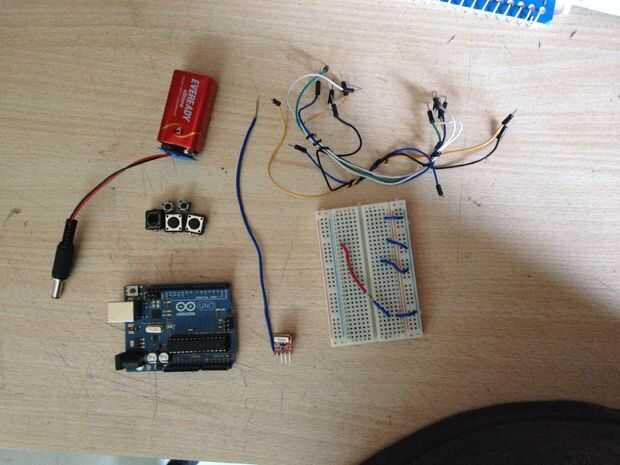

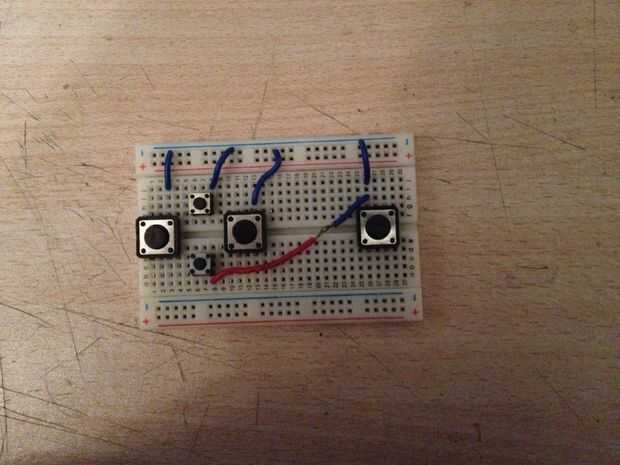
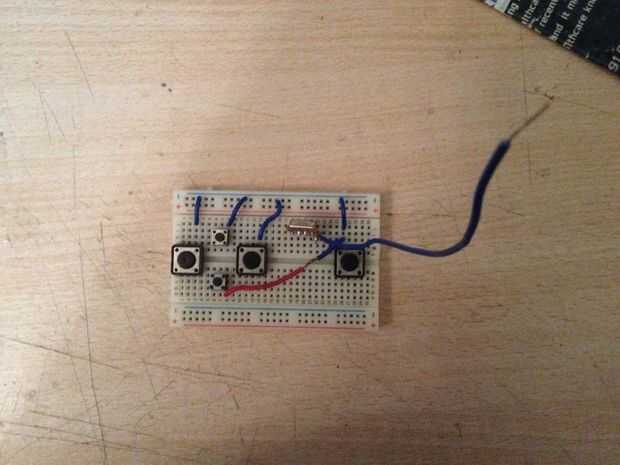
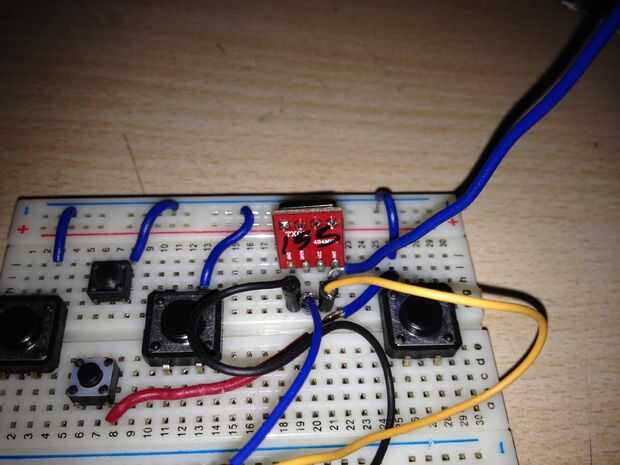
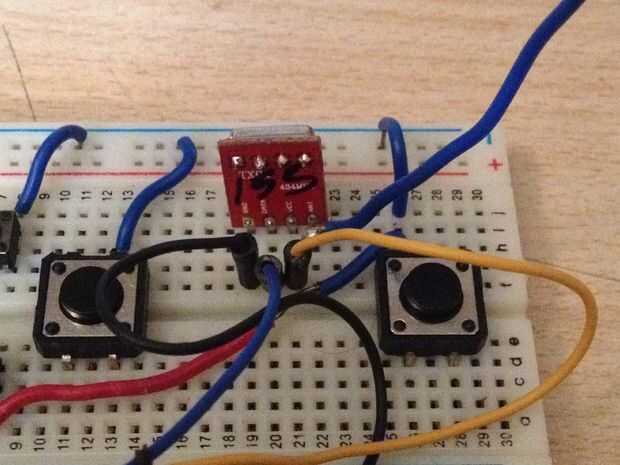
Aquí es donde los botones entran en uso... conectar los pulsadores de forma que encuentres cómodo controlar el bot (ver las fotos de referencia).
Asegúrese de que identificar los terminales correctos de todos los interruptores.
Las conexiones:-
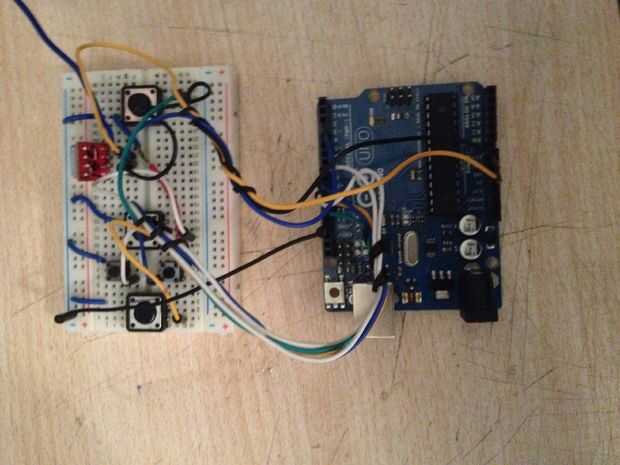
Conecte un terminal de cada interruptor a una tierra común que se conecta a un conector de tierra de Arduino (nuevo vea las fotos).
Conecte la otra terminal a un pin Digital de Arduino.
Las conexiones deben ser algo como esto:-
Botón Pin Digital
Forward -------------------------------------------> 08
Backward ------------------------------------------> 09
Right --------------------------------------------> 10
Left -------------------------------------------> 11
Stop --------------------------------------------> 12
Se puede cambiar las conexiones de pin digital... pero asegúrate de que cambiarlos en el código de RemoteTx así!!
El código:-
(1) el código de Tx:-
El código se lee cada vez que se pulsa un botón desde el pin digital correspondiente va bajo. Basado en que pin digital va bajo el comando correspondiente es transmitido.
(2) El código de Rx:-
El código recibe el byte transmitido y basado en el movimiento ha recibido un comando del bot en la dirección deseada.
Ambos códigos se unen en la parte inferior.



")






")

 con Arduino y Android(bluetooth)")
