Paso 4: El receptor

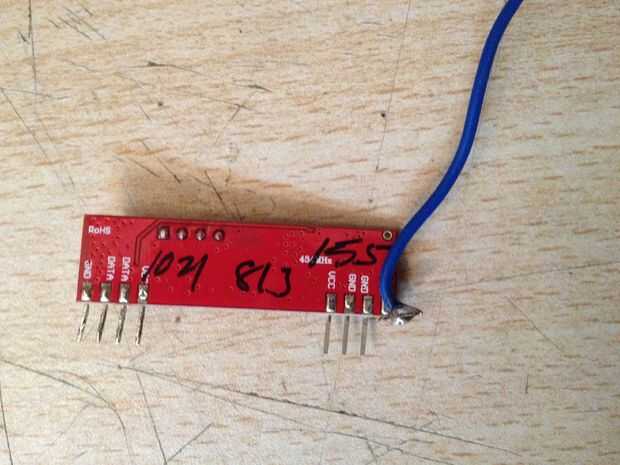


(1) Hormiga
(2) Toma de tierra
(3) Toma de tierra
(4) VCC
(5) VCC
(6) Datos
(7) Datos
(8) Toma de tierra
Nota:-Solo usamos el primer pin de datos (pin 7).
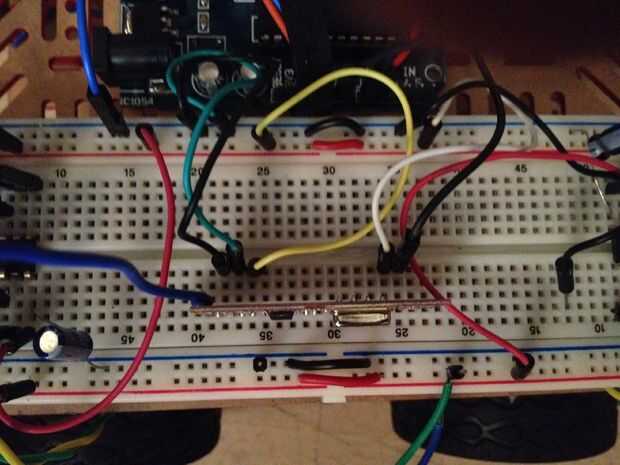
Ahora tome el segundo cable de 17cm y soldar al pin del módulo Rx Ant.
Conexiones:-
Estas son las conexiones entre el Arduino y el módulo de Rx.
Rx Arduino
Vcc-----------------------------------> 5v pin
Tierra---> Gnd pin
Datos---> Pin Digital 2
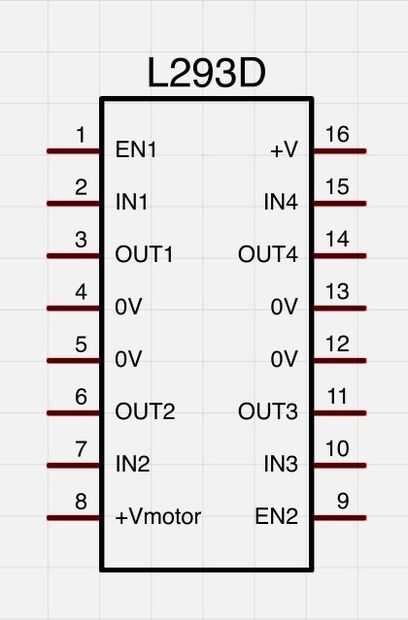
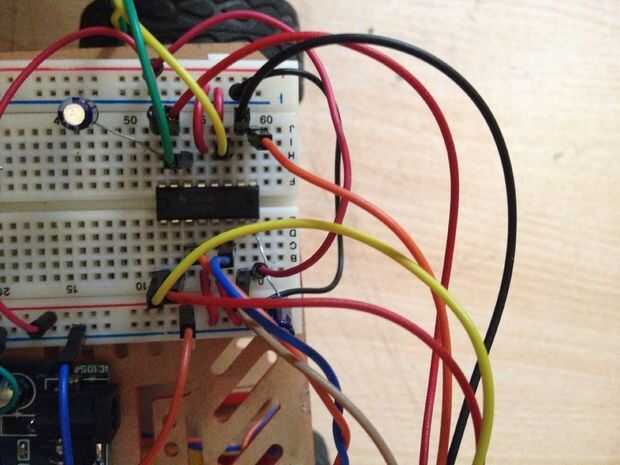
Usted también necesitará conectar los dos chips de controlador de motor L293D para el Arduino en el receptor. (Diagrama de pines del L293D en las fotos) Asegúrese de que usted conecte el chip correctamente... al final con la muesca es el front-end.
Primer Arduino L293D
Enable1---> Pin Digital 05
Enable2---> Pin Digital 06
Entrada 1---> Pin Digital 07
Entrada 2---> Pin Digital 08
Entrada 3---> Pin Digital 09
Entrada 4---> Pin Digital 10
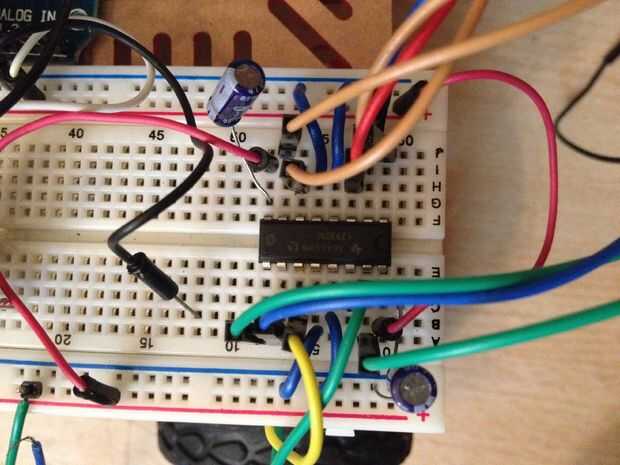
Segundo L293D Arduino
Enable1---> Pin Digital 03
Enable2---> Pin Digital 11
Entrada 1---> Pin Digital 04
Entrada 2---> Pin Digital 12
Entrada 3---> Pin Digital 14(Analog 0)
Entrada 4---> Pin Digital 15(Analog 1)
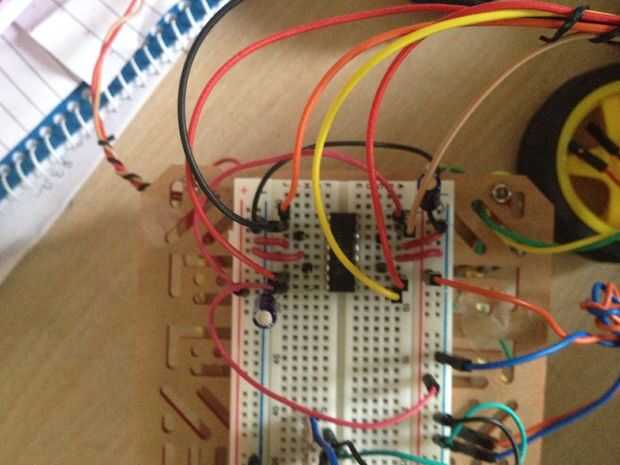
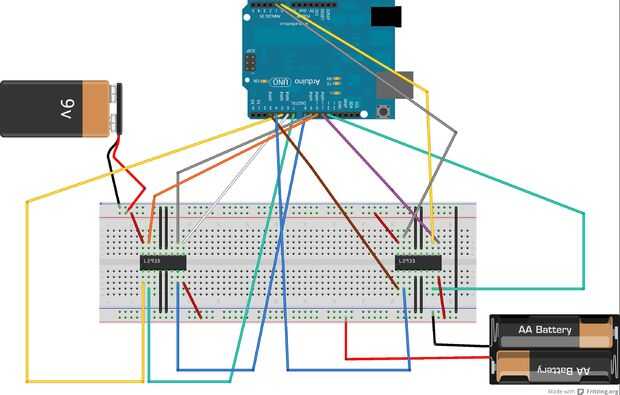
Conexiones adicionales:-
(1) Para el controlador de motor L293D:-
Pin 8 del ambos chip L293D vaya a la poitive de la fuente de 12V... este pin le da el poder a los motores.
Pins 4,5,12,13 de ambos chips de ir a la tierra.
Pines 3 y 6 están conectados a los cables del primer motor... y pernos 11,14 ir a los hilos del segundo motor. (Lo mismo para el segundo L293D así pero para motor tercero y cuarto).
Pin 16 de ambos chips está conectado a la fuente de 5v de Arduino... este pin acciona el chip.
Muy importante:-Asegúrese de que Arduino y 12V fuente de motivos están conectados juntos!!!!!! El código:-
Este código es recibe los comandos de transmisión de la Tx y se mueve el robot en la dirección deseada.
Nota :-este código se utiliza cuando el robot se controla mediante la entrada del computador. Otro código modificado se utiliza con el controlador de la placa y puede ser descargado en el paso 3.



")






")

 con Arduino y Android(bluetooth)")
