Paso 2: Material y herramientas









Material
3D impreso componentes (grabber (4 piezas), horn (2 piezas) de acoplamiento, acoplamiento barra * 2)
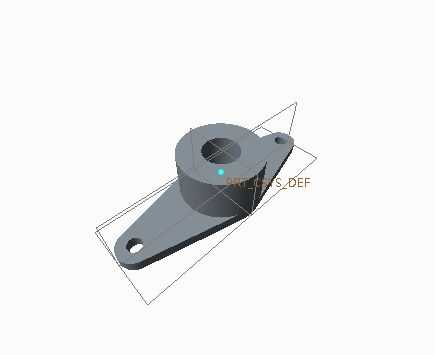
Figura 2-1 plano Base del grabber
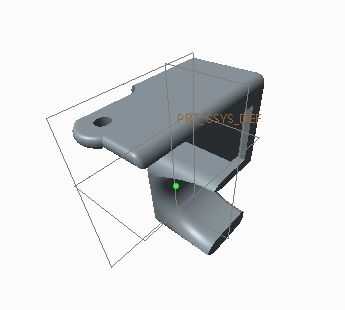
Conector de cuerno Grabber Figura 2-2
Cuerno del Grabber de la figura 2-3
Bloque deslizante Grabber Figura 2-4
Bocina de eje Base Figura 2-5
Figura 2-6 potenciómetro Base cuerno
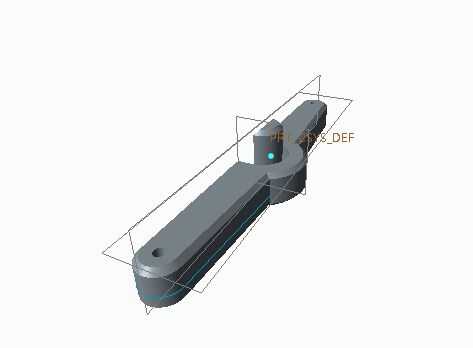
Figura 2-7 barra de acoplamiento
Figura 2-8 4DOF servo controla brazo robótico
Figura 2-9 el brazo de suspensión
Figura 2-10 0-50Kohm potenciómetro * 4
Resistores de la figura 2-11 10K
Figura 2-12 220V-5V 2A adaptador de potencia
Herramientas
Pistola de pegamento caliente; pistola de aire caliente; destornillador; multi-meter; soldadura de hierro;


")









")
