Paso 12: electrónica
1. soldar dos cables a cada motor.
2. Conecte los cables de los motores izquierdos al canal izquierdo electrónico de velocidad (salida). Tienes uno de los cables de cada motor en cada lado del conector. Repita para el motor adecuado.
3. Enchufe los conectores del canal derecho e izquierdo de la ESC en los canales 1 y 2 del receptor de radio.
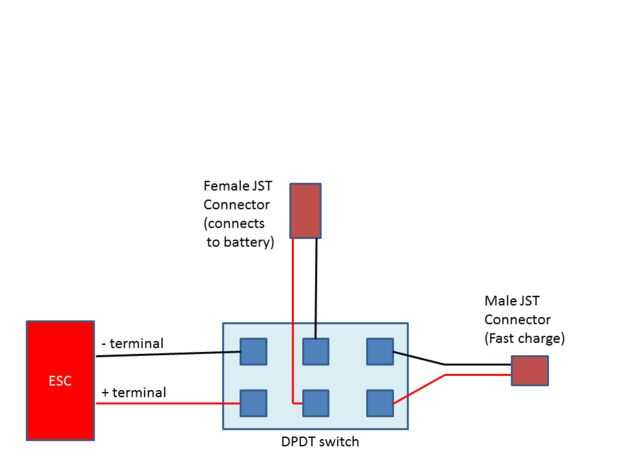
4. Conecte el interruptor, conector JST macho, conector JST hembra y salida como se muestra en la segunda foto.
5. Enchufe la batería en el conector JST hembra.
Los cables de alimentación (pasos 4 y 5) es tal que cuando el bot está apagado, la batería se desconecta totalmente de la electrónica interna y sólo está conectada al conector de carga rápida. Del mismo modo, el conector de carga rápida se desconecta completamente de la batería cuando el bot.
Prueba de la electrónica
Encienda su transmisor y luego el bot. Prueba adelante, atrás, girar a la izquierda, girar a la derecha. Si ambos motores en un lado se gira al revés, intercambiar dos de sus conductores en la conexión de la ESC. Si sólo uno está girando al revés, solamente permutar sus plomos. Puede tomar algún ensayo y error para conseguir todo lo que mueve la dirección correcta. Puede que necesite cambiar los canales de salida en el receptor de radio.













