Paso 4: Detalles del diseño





Pontones & motores
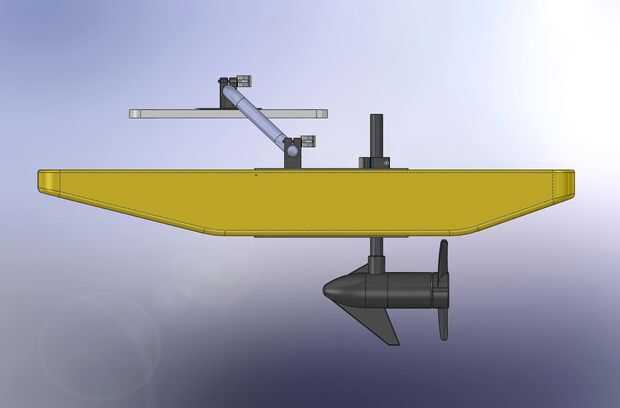
Los pantalanes están construidos de espuma de célula cerrada impermeable. Utilicé algunos espuma de construcción bastante rígida, pero puede utilizar la espuma de un viejo boogie board o espuma impermeable similar. Los pontones son aproximadamente 48 pulgadas de largo, 9 pulgadas de ancho y 5-6 pulgadas profundas. En uso, los pontones dibujan menos de una pulgada de agua (no incluyendo los motores).
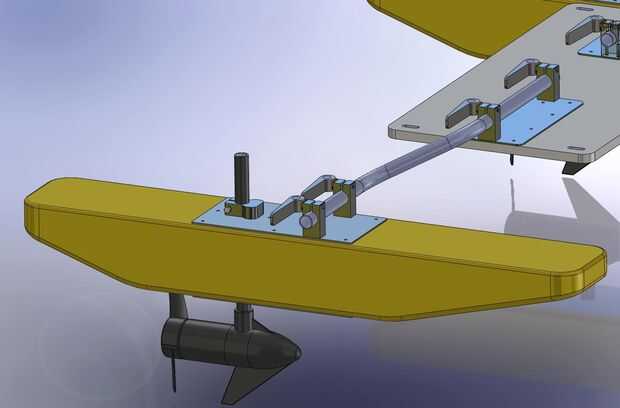
Placas de aluminio se atornillan a la espuma, superior e inferior, con pernos pasando por la espuma, para proporcionar una robusta base para unir al montar Motor y Outrigger Pole estaciones a. El CAD dibujo muestra el montaje del Motor separado del Outrigger Pole estaciones por cerca de 6 pulgadas. En el final desigh, esta dimensión se reduce a unas 3 pulgadas.
Montaje Motor y Outrigger Pole estaciones son atornillados a la placa superior de pontón de debajo con tornillos de cabeza avellanada.
Compré los motores de trolling de Minkota 30 de Amazon.com, nuevo por $117. Corté la parte superior del eje abajo de ellos antes de alguna vez les enciende! Sólo el más grande calibre rojo y los cables negros se utilizan ya que es un PWM (Pulse-Width modulado) de accionamiento. Los cables de la bobina de la velocidad en los motores se corte, grabados y empujados detrás en los ejes de abajo.
Postes de soporte
Los postes de soporte en el diseño actual están hechos de 1 pulgada de diámetro galvanizado acero conducto eléctrico ($6) doblado en un conducto doblado prensa. En mi próxima actualización de diseño, planeo hacer el poste de soporte como una pieza que va desde un pontón completamente sobre el otro. También trataré de hacer de tubo de aluminio. Con el fin de incorporar el poste de soporte como una sola pieza, voy a tener que modificar las estaciones de la placa de la cubierta para permitir el poste de soporte caer de la parte superior en comparación con el diseño actual donde los dos polos se deslicen del lado.
La placa de cubierta
La placa de cubierta está hecha de un pedazo de Marina de 1/2 a 3/4 de pulgada o contrachapado de exterior y es de aproximadamente 13 de 31 pulgadas de tamaño. En el diseño actual, dos placas de aluminio se sujetan a la madera contrachapada para facilitar el montaje de las estaciones de Outrigger de debajo con tornillos de cabeza avellanada. Mi actualización simplemente harán de este un plato único, además de modificar las estaciones para permitir que el polo de la canoa que bajé en desde arriba.
El Outrigger Pole estaciones realizan medida abrazaderas ligeramente más grande que el diámetro de los postes de soporte, y utilizar un asiento de bicicleta Cam perno a squeez les firmemente a los postes de soporte.
Los agujeros ranurados en los lados de la placa de cubierta mantienen las correas de montaje firmemente en el lugar deseado. Estas correas son trinquete estilo lazo de sujeción de carga disponible en los distribuidores de carga o casi cualquier tienda de mejoras para el hogar.
LAS ELÉCTRICAS
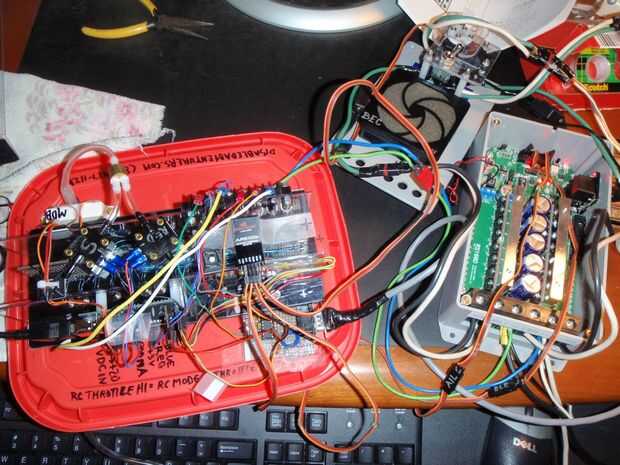
Consulte el diagrama de sistema y operador Panel esquemático para la mayoría de la información necesaria para armar el sistema eléctrico.
Usé un muy robusto controlador de Motor, el RS160D (~ $430), de soluciones robóticas (www.Robot-Solutions.com). es como si este controlador fue diseñado específicamente para mi proyecto contemplada virtualmente cada funcionalidad requerida. En realidad, la principal intención de usuarios son esos tipos que hacen los robots gigantes de combates.
Había diseñado y construido el Panel del operador exactamente a los criterios descritos en el esquema, así que no entraré en mucho otros datos sobre ella en este momento, salvo para decir que usé una fresadora para precisamente perforar 32 LED en el panel negro de fibra de vidrio como se ve en las fotos, y el panel fue sellado a la tapa de la caja con masilla impermeabilizante suave. El diseño actualizado agrega LEDs adicionales para indicar la actuación del interruptor de SORBO y soplo. Todos los LEDs son de DigiKey (www.DigiKey.com), parte #s: rojo = SSI-LXR4815SRD, verde = SSI-LXR4815GD ($1,25 cada uno).
Hice el interruptor de alimentación principal disponible fuera del recinto y había ocultado en un frasco de película plástica. El interruptor asegura la tapa del frasco de película para el lado de la caja y el frasco de película atada se apareció en su lugar sobre el interruptor, efectivamente lo que es a prueba de agua.
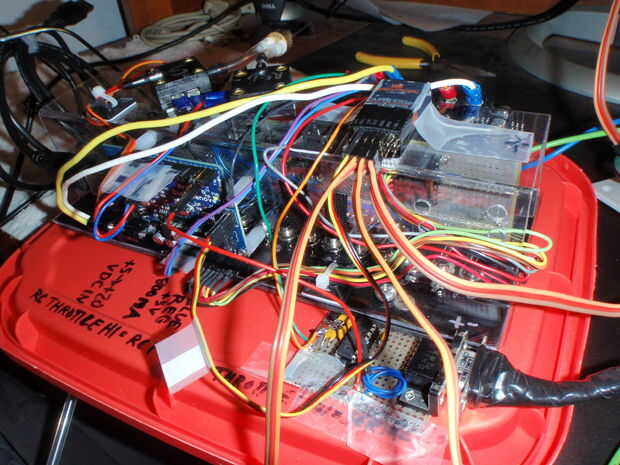
He utilizado dos DesignFlex, Inc. de presión/vacío cambia, de productos industriales Global (www.globalepower.com) , pieza Nº 7882-710 ($17 cada uno), para mi interruptor de SORBO y soplo. La línea de aire del operador es Y'ed 2 líneas entonces uno está conectado al puerto del alto de un interruptor (presión = soplo) y el otro está conectado al puerto de bajo del otro interruptor (vacío = Sip).
Usé un TTL a tablero de la palanca de cambios de nivel RS-232 de SparkFun (SparkFun.com), parte # PRT-08780 ($10), interfaz entre el Arduino y el conductor del Motor y, por supuesto, el u-controlador Arduino sí mismo, de SparkFun con parte # DEV-00666 ($34).
El interruptor de hombre al agua es un interruptor de láminas magnético de un sistema de seguridad para el hogar. El lado del interruptor está asegurado en el interior del Panel de operador para mantenerlo en el tiempo. El lado del imán tiene un cordón que puede estar vinculado a salvavidas del jinete.
Aparte de la Sip y Puff paja (e interruptor), el interruptor de lengüeta magnética MOB es el sólo entrada física en el sistema. El sistema arranca en modo de práctica (motores no funciona) y cada vez que el imán es eliminado y reemplazado, el sistema activa dentro y fuera del modo de práctica. Tomar el control del sistema con el transmisor de RC también tendrá el sistema en modo de práctica.
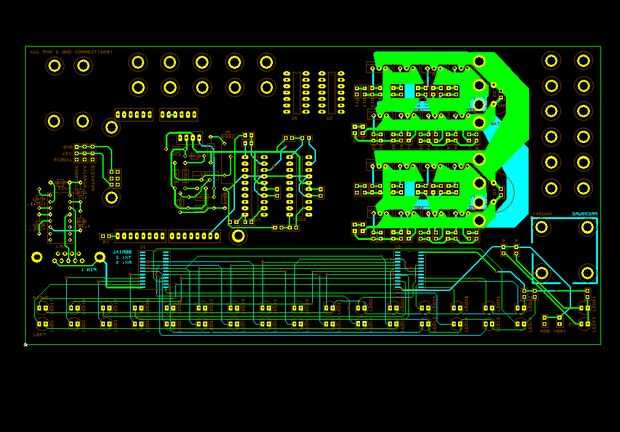
Espero tener mi diseño de PCB (Printed Circuit Board) terminado a tiempo para mi siguiente iteración de este proyecto. La última foto que se adjunta a esta sección muestra cómo que viene a lo largo. Aún tiene que decidir si seguir adelante con la incorporación de la sección de conductor del Motor (se muestra en negrita verde brillante) para el diseño de PCB ya que estoy muy a gusto con el producto de soluciones robóticas en este momento. Todos los otros sub sistemas, excepto el receptor RC Digital, ciertamente serán incorporados.
EL SOFTWARE DE
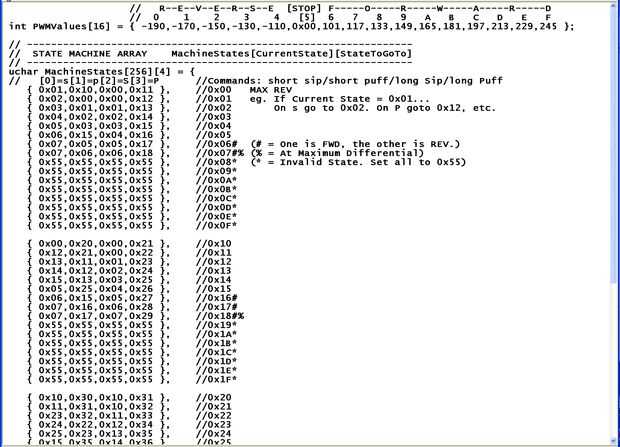
Originalmente trató de implementar el código de control como puramente regla de lógica basado en codificación. Trabajó bien pero era muy difícil de actualizar, modificar y entender. Había reescrito el código de control como casi en su totalidad una máquina de estado. Aparte de la propia mesa de estado, el código es muy pequeño para la funcionalidad que proporciona. La máquina de Estados deja absolutamente sin duda a lo que el sistema va a hacer cuando se recibe la siguiente orden.
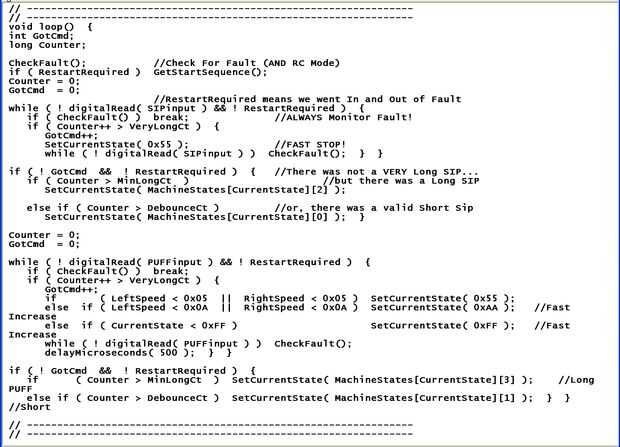
El primer segmento de código siguiente es la tapa de la mesa de la máquina de estado, y el segundo segmento de código es el operación todo el lazo! Hay solamente algunas otras funciones, se obtiene la secuencia de arranque de seguridad, una supervisa condiciones de falla y hombre al agua y otros los LEDs de control y envían comandos de velocidad que el conductor del Motor.
Para los frikis (como yo)...
Refiriéndose a la esquemática de Panel de operador, el código siguiente establece los LEDs:
// ----------------------------------------------------------------
anular el ser (int valor, int RightNotLeft) {}
Levantar el Pin de Strobe apropiado
PORTC = (RightNotLeft? 0 x 20: 0 x 10) | Valor; y valor de LED en las patillas
delayMicroseconds (5); Breve pausa para el tiempo de instalación LE
PORTC = valor; } //Lower estroboscópico al valor de cierre
// ----------------------------------------------------------------













