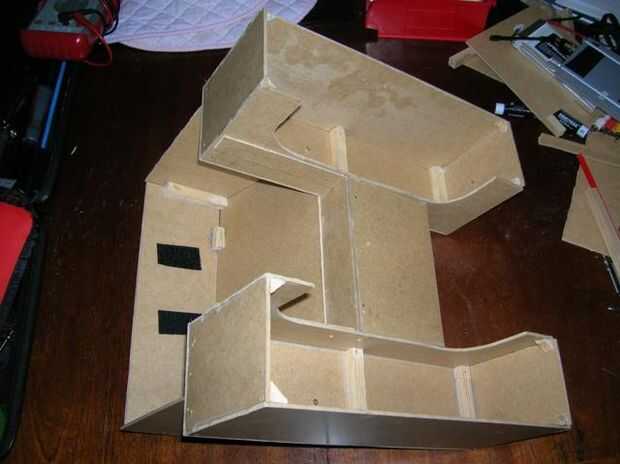
Paso 2: La silla

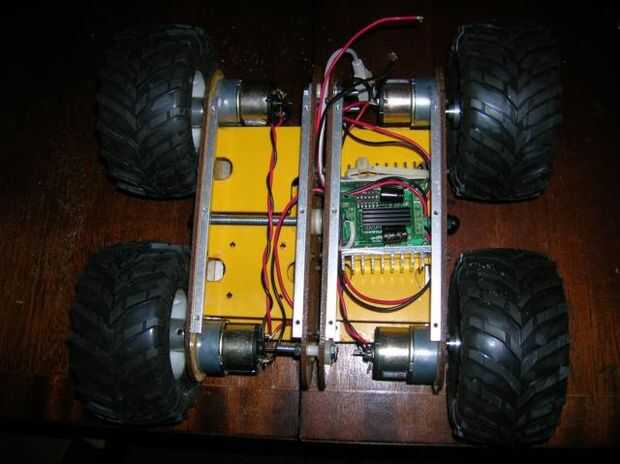



El rover fue montado fácilmente y cableado los motores con el cable de una fuente de PC vieja. He probado cada motor en ambas direcciones por lo que podría crear dos pares coincidentes, un par para el lado izquierdo y un par para el lado derecho. Si el rover tiró a un lado, se podría recortarse fácilmente hacia fuera.
El Presidente entonces fue acoplado a la rover y allí comenzó muchas horas de mirar fijamente en la vuelta tratando de imaginar donde todo tenía que ir. Una vez que feliz, me puse sobre la adición de puntos de montaje y las restricciones para el MDF que necesitaría para garantizar los componentes de la cáscara.
Un controlador de velocidad de Sabertooth 2 x 10 se instaló en el rover y el lanzamiento rápido de cableado permite que el rover estar separado de la cáscara donde se encuentra el receptor RC y distribución de energía. Esta compuesto por un cable de extensión USB viejo cortar por la mitad y utiliza para desconectar las señales RC y un conector de batería Tamiya para el poder.
http://www.dimensionengineering.com/Sabertooth2X10.htm
Crea un espacio seguro para un paquete de baterías LIPO en el corazón de la rover y se aseguró que había no hay clavos, tornillos, etc. que podría moverse y spike el paquete. Conectores Tamiya fueron utilizados otra vez para conectar en el interruptor de fusible principal.
 (impresión 3D)")












