Paso 2: El programa & cableado
El programa de arduino puede descargarse de: http://arduino.cc/en/Main/Software
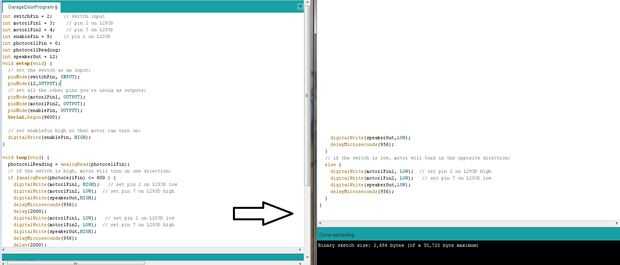
El programa de la puerta del garaje se encuentra en la imagen
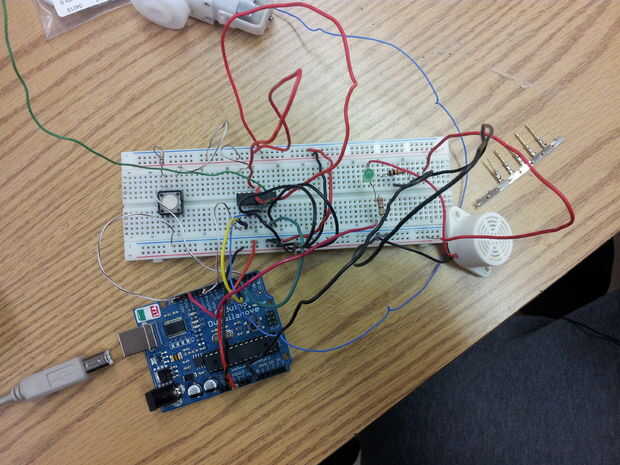
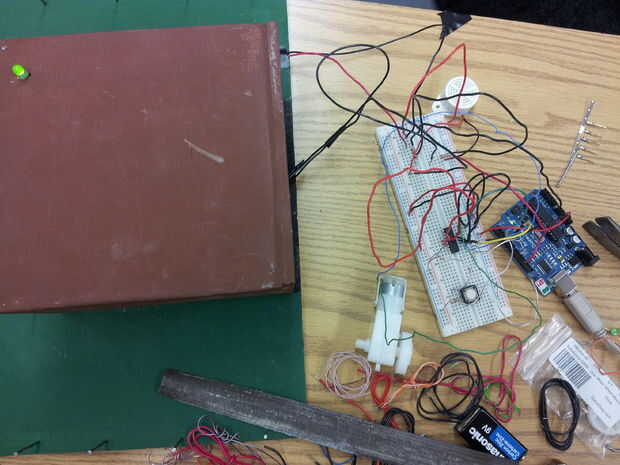
El cableado está situada en la imagen, así
int switchPin = 2; entrada del interruptor
int motor1Pin1 = 3; pasador 2 L293D
int motor1Pin2 = 4; 7 pines en el L293D
int enablePin = 9; Pin 1 de L293D
int photocellPin = 0;
int photocellReading;
int speakerOut = 12;
void setup(void) {}
Coloque el interruptor como entrada:
pinMode (switchPin, entrada);
pinMode(12,OUTPUT);
establecer todas las clavijas que utilizas como salidas:
pinMode (motor1Pin1, salida);
pinMode (motor1Pin2, salida);
pinMode (enablePin, salida);
Serial.Begin(9600);
conjunto enablePin alta para que el motor puede girar:
digitalWrite (enablePin, HIGH);
}
void loop(void) {}
photocellReading = analogRead(photocellPin);
Si el interruptor está alta, el motor girará en un sentido:
Si (analogRead(photocellPin) < = 900) {}
digitalWrite (motor1Pin1, bajo); configurar pin 2 el L293D baja
digitalWrite (motor1Pin2, HIGH); configurar pin 7 el L293D alta
digitalWrite(speakerOut,HIGH);
delayMicroseconds(956);
Delay(3000);
digitalWrite (motor1Pin1, bajo)
; configurar pin 2 el L293D baja
digitalWrite (motor1Pin2, bajo); configurar pin 7 el L293D alta
digitalWrite(speakerOut,HIGH);
delayMicroseconds(956);
Delay(4000);
digitalWrite (motor1Pin1, HIGH); configurar pin 2 el L293D baja
digitalWrite (motor1Pin2, bajo); configurar pin 7 el L293D alta
digitalWrite(speakerOut,HIGH);
delayMicroseconds(956);
Delay(1500);
digitalWrite(speakerOut,LOW);
delayMicroseconds(956);
}
Si el interruptor es bajo, el motor girará en sentido contrario:
Else {}
digitalWrite (motor1Pin1, bajo); configurar pin 2 el L293D alta
digitalWrite (motor1Pin2, bajo); configurar pin 7 el L293D baja
digitalWrite(speakerOut,LOW);
delayMicroseconds(956);
}
}

 con puerta automática")






")

")


