Paso 9: La electrónica
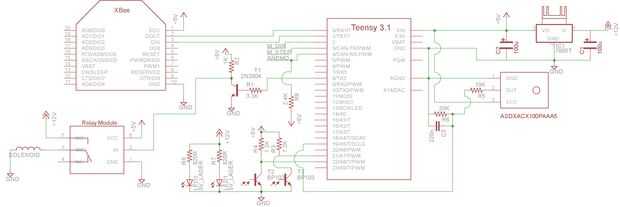
Para controlar todo el sistema se utilizó 3.1 Teensy. Es un potente Microcontrolador con procesador ARM y es compatible con Arduino.
Sistema de alimentación
Para la electrónica de potencia se utilizó batería LiPo de 3 celdas . Se debe utilizar la batería más de gran alcance se pueden encontrar (y se ajusta a su presupuesto). Los amplificadores más usted tiene el tiempo más que se obtiene cuando el sistema de encendido.
La electrónica del sistema utilice 5v para el Teensy y 12v para los motores y el solenoide.
Utilizamos el regulador de voltaje para obtener 5v salida y agregado dos capacitores de 100uF a la entrada y salida para reducir el ruido.
Asegúrese de añadir el disipador de calor a él porque puede estar muy caliente.
Sensor de presión
El sensor tipo ASDXACX100PAAA5 es absoluta que nos da salida analógica con respecto a cero. Si nos la muestra en medio abierto debemos leer cerca de 14.7 psi (1 ATM). Esta es una buena manera de asegurarse de que estamos conectados correctamente y la traducción de la salida analógica a valores de psi.
Puesto que el Teensy opera en 3.3v y el sensor es 5v utilizamos dos resistencias de 10 K y 20 K como divisor de tensión.
También hemos añadido condensador de 220nF para reducir el ruido en la lectura.
El sensor conectado al pin A5 en el teensy.
Anemómetro
El anemómetro es un sensor de pasillo sencillo que hace que un impulso cuando un imán pasa cerca de él.
Fije una interrupción con conector de 4 para cada cambio en el estado del pin (caída o aumento) y contar cuántas interrupciones llegamos en un segundo.
El sensor hall necesita resistor de pull-up para que resistencia de 2,4 K está conectado entre la señal y 5v.
Solenoide de
El solenoide es una válvula eléctrica simple que se abre al aplicar energía. Para abrirlo lo conectó para transmitir directamente a la batería. El relé conectado a la placa Teensy a través del transistor para evitar sobrecargar el Teensy pin (que no capaz de proporcionar muchos amperios). El relé conectado al pin 8.
Motor paso a paso
El motor es conectado al desactivar el controlador de la plataforma. El controlador conectado a la Teensy al pin 2 y 3 para la dirección y los pasos. Más información en el paso de software.
Velocímetro
Los dos láseres del velocimetro conexión a 12v a través de 820 ohmios. Los fototransistores conexión a los pines Teensy 21 y 22 con resistencias de pull-up (1.2K).
La distancia entre los fototransistores es 5cm (0,05 m) para obtener la velocidad en metros por segundo que dividimos la distancia por el tiempo que tardó el cohete paso esta distancia. Medimos el tiempo en microsegundos para obtener lectura más precisa de la velocidad.
Comunicación
La comunicación con el sistema es inalámbrico serie de comunicación con módulo Bluetooth o XBee.
Conectamos el módulo a pernos de RX/TX de Teensy.
Comunicación inalámbrica es más segura, podemos lanzar el cohete desde una distancia segura.






 R/C")






