Paso 10: Software
La fuente de software se puede encontrar aquí: https://github.com/romansky/Apollo
- Controlador: Código Teensy
- Apollo.py: versión de python
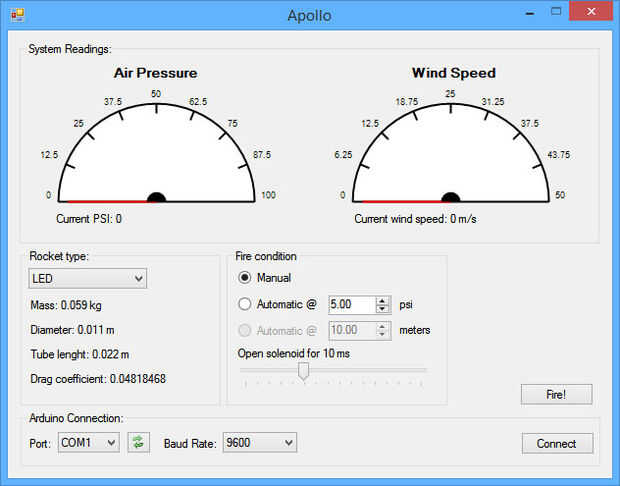
- CSharp/Apolo: Versión C#
El controlador de
En el archivo config.h contamos con todas las constantes del proyecto (números, tiempos, distancia, etc.)
Para escribir pernos de RX/TX de Teensy necesitamos usar "Serial1" puesto que "Serial" utilizado por el USB serial. Cambie la constante "HWSERIAL" Si desea depurarlo.
Otra constante importante es "PITCH_MOTOR_STEPS_PER_ANGLE", necesitará cambiarlo según su conductor del motor. La configuración actual es 400 pasos por 90 grados.
Protocolo de comunicación
Controlador para PC
AXX - anemómetro: interrupciones por segundo (int)
Pxx - Sensor de presión: presión en psi (flotador)
SXX - velocímetro: velocidad en m/s (flotador)
AH - indicador de primer velocímetro alta
AL - indicador de primer velocímetro bajo
PC controlador
RXX - abrir el solenoide para xx milisegundos (int)
CXX - calibrar el pitch de la plataforma a los actuales grados (flotador)
SXX - establece el tono de la plataforma (flotador)
El indicador AH y AL velocímetro le permite saber si las aletas del cohete rompe el láser para el fototransistor inferior o no permitir que vuelva a colocar el cohete.
Desarrollo posterior
El software está actualmente en desarrollo.
Planeamos agregar más funcionalidades como distancia calculada (disponible en versión de python) de presión, ángulo, velocidad del viento y la dirección (también construir el hardware de la dirección de viento).
Selección de destino en el mapa y calcular la presión necesaria y ángulo para golpear la blanco.
Mantener seguimiento este instructable y el repositorio git para actualizaciones






 R/C")






