Paso 3: Conectar con Esplora
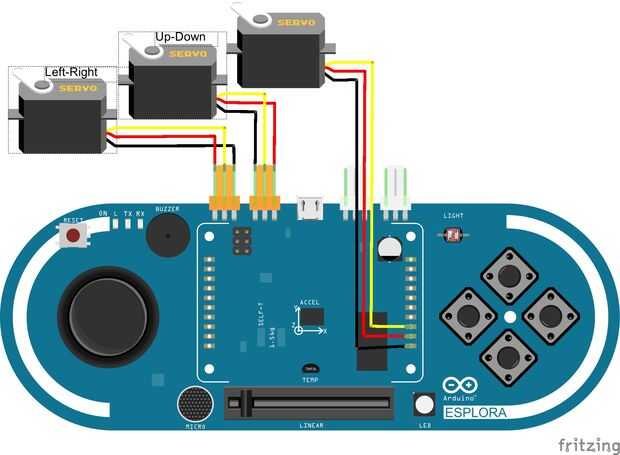
Básicamente, Arduino Esplora board tiene dos Tinkerkit PWM salidas digitales conectados a D3 y D11, cada uno tiene tres pines con (+ 5V, datos, GND) pernos (en orden de izquierda a derecha). Estos dos conectores se utilizará para controlar los dos servos de la pulsera de tilt/pan.
Nota: tenga cuidado de la orden de pin de tus servos. generalmente, los conectores kit Tinker tiene el pin de datos en medio de los pines Vcc y GND, mientras que no Tinkerkit servos tiene la orden (GND - Vcc - datos), así que necesita invertir los pines Vcc y datos en el conector de tu servo.
Ahora, para la imagen de mecanismo de disparo, tenemos servo adicional, que básicamente sólo 90 grados mueven hacia atrás y hacia adelante para simular un dedo haga clic en el. Para ello, necesitamos aprovechar las clavijas de toma de extensión Esplora LCD.
Aquí se conectará el tercer servo a 5V, GND y pin D1 (los pernos de la parte tres primeros inferior en el zócalo derecho).













