Paso 5: Instalación de los componentes electrónicos en el chasis






Construcción del sistema neumático:
Después con éxito de haber conectado todos los componentes (que es un poco complicado porque hay tantos cables que fluye alrededor y tener que poner en una sistemática manera), tienes que montar en el chasis interno. Primero hacer alguna construcción de las dos bombas similares a la foto de arriba. Podría hacerlo un poco diferente pero la lógica de conexión tiene que ser el mismo o de lo contrario el sistema neumático no funcionará correctamente. Como se ve en la foto, hay una válvula para cada bomba, conectado directamente a la bomba específica. Entonces hay 2 conectores en T entre ellos y en cualquiera de los dos extremos otra vez 2 válvulas están conectadas que controlan directamente el flujo de aire a través de cada globo. Esta construcción garantiza la pérdida de aire mínima porque sin las 2 válvulas que están conectadas directamente a cada una de las bombas, mientras bombea el aire en los globos, una cantidad de aire fluiría no en los globos pero en la bomba del vaccuum debido a la conexión T entre las dos bombas. En cualquiera de los extremos de las válvulas de globo se conecta una manguera que otros extremos se conectan en los globos más adelante. (Se aconseja para conectar los globos más adelante cuando el neumático entero se fija en el chasis para hacerlo más fácil de utilizar). Asegúrese de conectar todo exactamente como en las dos fotos de arriba. Si ponen el sistema como en las fotos, los dos orificios exteriores de las bombas tienen que estar conectado. Esto es porque cada una de las bombas puede ser utilizada como vaccuum o bomba de aire y queremos usar una bomba de aire y el otro como vaccuum que se decide por que los conectores de las bombas que conecte las mangueras a!
Montaje del Arduino y el tablero del PWB en el chasis:
Haber construido esto, podemos empezar a montar los componentes electrónicos en el chasis. Para esto como se puede ver en las dos primeras fotos, la fuente de alimentación de 12V es fijada con tornillos en la parte media de la parte inferior del chasis (orificios para los tornillos ya están preparados en caso de la fuente de alimentación). En uno de los lados en la parte inferior del chasis el Arduino y el tablero del PWB se fijan también con tornillos en los orificios por lo tanto preparados otra vez.
Montaje del neumático en el chasis:
Ahora llegamos a la determinación del sistema neumático que construimos anteriormente. Para esto, tienes que poner el elemento de fachada todo boca abajo. En la parte superior media del chasis (que ahora son la parte inferior) arreglar el sistema neumático. Asegúrese de pegar icopor (poliestireno) en el área donde el sistema neumático se haz fijo porque va ha prevenir que la vibración de las bombas (que es realmente alto) obtener transportará al marco entero y también ayuda a poner el ruido de las bombas hacia abajo un poco.
Algunas mejoras:
- Perfore otro agujero en la parte inferior del chasis entre Arduino y la fuente de alimentación para el cable USB - Arduino para poder flash software de Arduino para futuras actualizaciones sin necesidad de abrir el elemento de fachada.
- también como se puede ver hay otro agujero en las fotos hay para el cable que viene de la fuente de alimentación
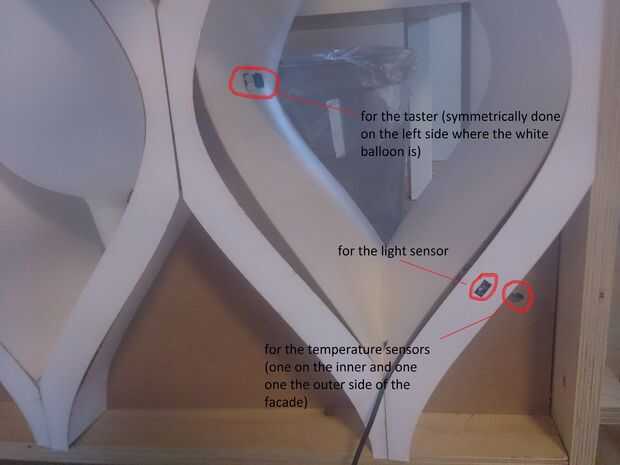
- perforar 5 como está marcado en rojo en una de las fotos en las paredes exteriores de los chasis y el chasis interno (2 para sensores de temperatura, uno en cada uno de los lados, un lado más adelante obtiene el interior del edificio y uno del lado del lado externo; 2 para los catadores digitales, uno por la parte interior del chasis; y 1 para el sensor de luz)




")








