Paso 4: Crear el cuerpo del Rover


Descargar el Ejecutor y la base del robot e imprimir mediante una impresora 3d, siga estos pasos para crear al rover:
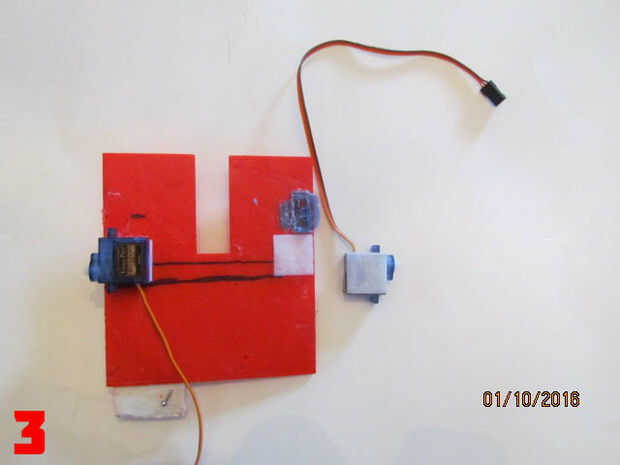
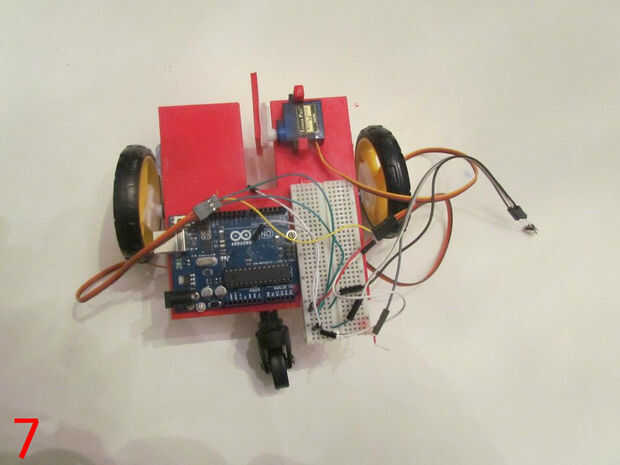
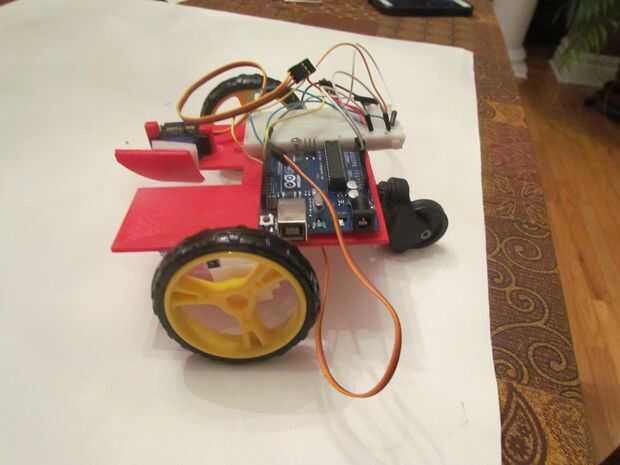
- Acople el motor servo que no fue hackeado en la parte superior del cuerpo como se ve en la imagen 1. Asegúrese de que el eje del servo quede hacia la parte delantera del rover. Nota: Asegúrese de que el servo de kicker es a 180 grados es la posición inicial.
- Atornillar o pegar el golpeador al brazo del servo y adjúntelo a la serva.
- Towerpro continua velcro los dos en la parte inferior del cuerpo Coloque el Velcro 2.28 pulgadas desde la parte delantera.
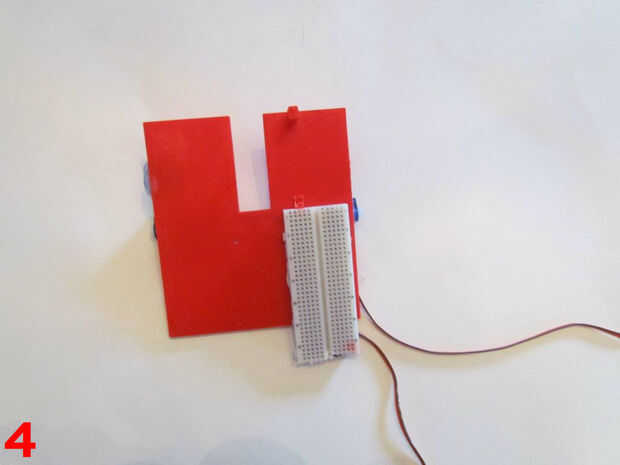
- Conectar la placa a la parte posterior derecha del cuerpo. La placa debe tener su propia viscosidad pero si no te puede usar Velcro
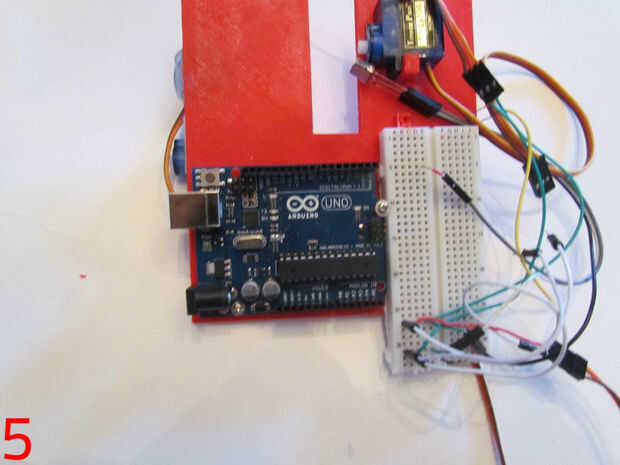
- Tornillo de la arduino a la parte posterior izquierda del cuerpo.
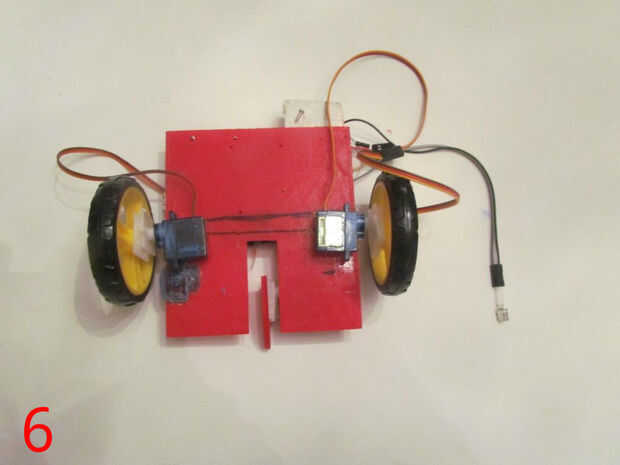
- Velcro o pega las ruedas a los brazos de servo Towerpro y conectar los servos de la parte inferior.
- Conecte las ruedecillas en la parte trasera del rover.
- La fuente de alimentación a la parte frontal de velcro a la izquierda del robot.
¿Qué pasa si no tengo una impresora 3D?
Está bien si no tienes uno. Hay diferentes maneras de hacer el cuerpo del rover y como tiene el Velcro debe ser fácil conectar los servos al cuerpo. Algunas de las cosas que usted puede utilizar, por ejemplo, son cartón, icopor, madera o plástico. Hay muchas posibilidades para elegir. Sólo asegúrese de que el tamaño y el diseño es el mismo que el mío.
Aquí está el código para poner el servo en posición inicial:










 con control remoto en frambuesa Pi 2")


