Con los años, he construido varios grandes robots mediante un controlador de robótica por encargo que he creado llamado el sistema SmartRover. Este controlador fue inicialmente usada para mi robot SmartRover que construí que funcionó en una corriente máxima de 60 amperios a 24 voltios. Obviamente, el SmartRover puede ser excesivo para muchos principiantes. Con la intención de compartir los fundamentos de la robótica con mi club y con muchos miembros interesados a adquirir habilidades prácticas con robots, decidí diseñar un robot DIY de menor escala. Esto en última instancia se conocía como el SparkRover, un kit de robótica asequible que dedicado exclusivamente a compartir con el club de Purdue Mechatronics.
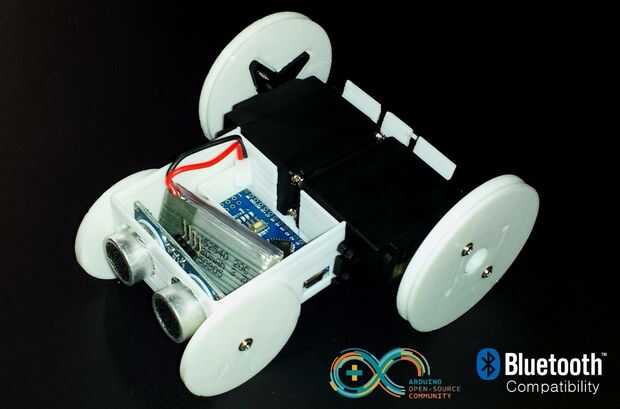
El SparkRover es un kit de robótica impresa 3D de código abierto que puede ser controlado por un Smartphone y puede evitar las paredes. Este robot puede ser controlado a través de Bluetooth y puede ser una gran manera para principiantes para aprender sobre el entorno de Arduino, comunicaciones en serie, el funcionamiento de los motores servos y sensores de ultrasonidos. El robot es recargable y programable, que es perfecto para los propósitos educativos.
La SparkRover puede ser utilizado para aplicaciones, incluyendo pero no limitado a:
- Plataforma de aprendizaje de robótica
- Automático de GoPro cámara Dolly
- Asistente de cámara panorámica
- Resolución de Robot laberinto
- Robot de carreras
Descargo de responsabilidad: Principios comunes de la seguridad y conocimiento de herramientas eléctricas y otro equipo utilizado deben tenerse al utilizar elementos que puedan causar lesiones o la muerte. Este proyecto se proporciona "tal cual" para fines educativos. El autor no es responsable por cualquier accidente o daño como resultado de este proyecto.

 también controlado por voz")



")

")
")




