Paso 4: Preparación de los Servos








Si usted tiene servos de rotación continua, por favor Omita este paso y usar éstos en lugar de usar Futaba S3003. El kit SparkRover contiene dos servos Futaba S3003 que deben modificarse en servos de rotación continua.
Este paso está diseñado para enseñarte como hacer un servo normal de un servo de rotación continua. Saber esto te puede dar una mejor comprensión de cómo funciona un servo y puede abrir tu mente a ideas más en el futuro.
Es importante realizar este paso con cuidado y suavemente. Usted puede posiblemente dañar un servo permanentemente si eres descuidado al abrir y modificar un servo. Además, este tutorial está destinado a los servos Futaba S3003. Otros servos pueden tener estructuras que pueden variar.
Realizar estos procedimientos en cada servo. Ser paciente, hacen tomar hasta 45 minutos en su primer intento.
Eliminación de parada mecánico (parte superior)
- Coloque firmemente un trozo de cinta azul a cada lado del pliegue inferior del servo.
- Tome un destornillador y desatornille los cuatro tornillos en la parte inferior del servo.
- Suavemente Quite la tapa del servo mientras lo sujeta en posición vertical.
- Retire el engranaje del medio. Retire el cojinete de metal.
- Tome las pinzas y con cuidado cortar el tope mecánico del engranaje del pasado.
- Cambie el medio engranaje y rodamiento de metal.
- Vuelva a colocar la tapa del servo mientras alinea la media del engranaje en el centro.
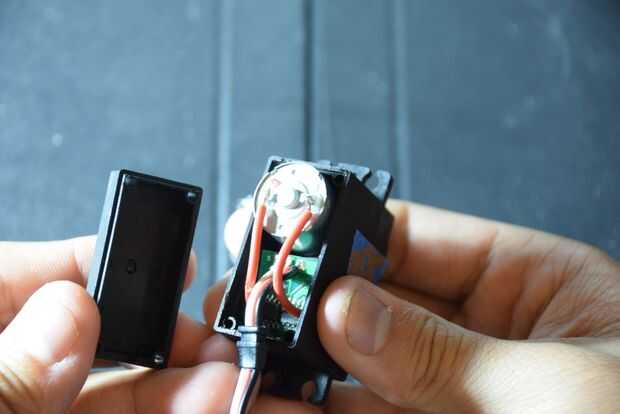
Desmontaje del Motor y circuitos (parte inferior)
- Retire la cinta azul. Colocarlo en el pliegue superior del servo.
- Retire la cubierta inferior del servo suavemente. Tire el motor en dirección hacia afuera.
- Suavemente Levante la placa de circuito. Debería ver un potenciómetro conectado a la caja.
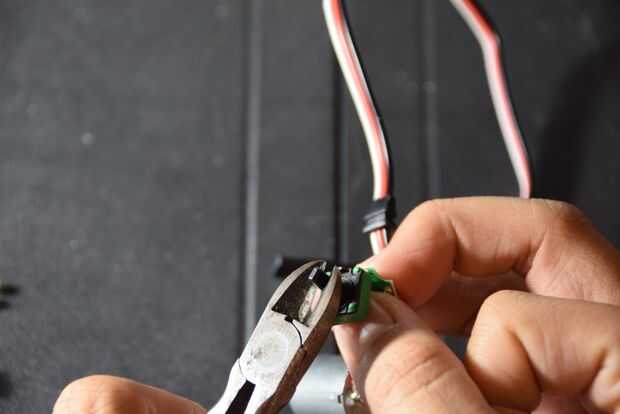
- Utilice alicates para doblar los pestillos de plástico con el potenciómetro hasta que se suelta.
- Empuje hacia atrás los pestillos de plástico y tire bruscamente el potenciómetro del recinto.
- Tome las pinzas y corte el parte superior eje del potenciómetro.
Calibrar el potenciómetro
- En este punto, debe tener las "entrañas" del servo. Conecte el cable blanco del servo a pin 9 del Arduino.
- Subir el código "Servo estabilizar" a su Arduino. Conecte el servo GND y VCC para el Arduino.
- Observar de cerca el motor servo. Si el eje está en movimiento, mantenga el ajuste el potenciómetro hasta que el motor deja de mover completamente.
- Una vez que el motor detiene, aplique una gota de pegamento caliente sobre el potenciómetro para sostenerla en lugar. También puede usar cinta azul en su lugar.
- Cuidadosamente colocar el motor dentro de la caja del servo. Vuelva a montar el servo y apriete los tornillos. Durante este paso, mantener el programa de Arduino hasta que usted completamente acabado de montar el servo. En cualquier momento, si el servo comienza variación nuevamente, abrir el servo y vuelva a ajustar el potenciómetro.
Una vez que vuelva a haber montado el servo, ahora debe ser capaz de tener rotación ilimitada.

 también controlado por voz")



")

")
")




