Paso 5: diseño


Ahora no tienes que preocuparse por la librería Servo.h porque su ya programada en el Arduino cuando está funcionando el chip. Por lo que simplemente puede copiar este código aquí o desde el sitio y ejecutarlo en su Arduino para ver si funciona correctamente.
Algo importante sobre este código es que cuando se ejecuta debe ser calibrado a los sensores que utiliza. Los que estoy utilizando no son foto reóstatos sino resistencias luz ambiente y son un poco más sensibles.
Para resolver este problema su tipo de un golpe o se pierda en el código, pero el área que desea que el mirar es el flotador cuenta de umbral. El flotador cuenta umbral calcula la cantidad de información que recibe de los sensores, corre a través de arduino y así dice el servo para girar en esa dirección.
Luego por último usted puede también meterse con el ajuste de retraso por lo que puede decir su servo si usted quiere que vaya ya sea rápido o lento dependiendo de lo que queramos.
Ahora llega hasta la parte de cableado por lo que tenemos que construir ahora es lo que se denomina un conjunto de sensor de luz. Eso significa que vamos a construir y variedad donde el servo girará a diferentes direcciones basadas en cuánto luz está siendo bloqueado a cada sensor. Para esta tarea necesitamos 5 resistencias de 10kohm, 5 sensores de luz ambiental y alrededor de 12-15 puente los cables que Irán a la arduino y el servo.
- Ahora cuando lo configure debe parecerse, ahora cuando veas el servo, viene con tres cables de colores que pegan donde es tierra marrón, el amarillo es la señal (básicamente donde sería enchufarlo en el arduino para darle información sobre cómo mover) y naranja y rojo es el positivo.
Desde allí usted va a necesitar un protoboard y los cables del puente pequeño. Un cable debe ir de la tierra en el arduino al lado positivo de la Junta, el otro cable debe ir desde los 3, 3V o 5v de arduino a la + lateral de la placa (que siempre servo puede tomar, debe decir en el libro caja o instrucción) opuesta al lado de la tierra. Entonces debe tener los cables de conexión del tablero al servo (por lo que el cable marrón debe tener un jumper en donde la tierra está en el arduino etc...) de la última pero no menos debemos establecer una conexión de la señal y esto y esto puede ser en cualquier lugar en, en los pines de arduino digital o analógica, para mí he usado analógico 0.
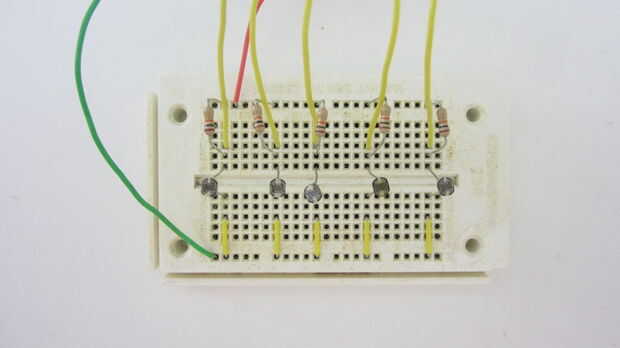
- A continuación, es establecer una conexión a tierra para que le enchufe una conexión de puente de la tierra de la arduino a la + lateral de la placa. En segundo lugar a lo largo de ese lado Conecte las resistencias en el mismo lado que el suelo de la tierra (o alimentación) a la mitad de la placa, que está más cerca del suelo (tren eléctrico). Luego hacemos otra conexión a la placa de arduino por puentes de conexión de la placa a los pines de arduino analogía 1-5.
- Una vez se han tapado los agujeros en el arduino con los puentes, luego proceder a conectar los otros extremos a los agujeros correspondientes que se encuentran en la placa donde se unen las resistencias.
- En quinto lugar, tenemos que crear un puente que une el lado con los componentes en ellos al otro lado de la placa por lo que necesitamos crear 5 puentes a las 5 conexiones que ya tenemos...
- Por último su momento la última parte donde conectamos nuestros fuentes de luz ambiente al otro extremo de la placa (enfrente de la tierra). Fuentes tesis otra vez se conectará a la misma fila que los puentes que hizo en el paso anterior y así por último conectado al lado negativo de la protoboard para completar el circuito. Recuerde que el tiempo es positivo y el corta final es negativo.
Después de todo está dicho y hecho debería funcionar así:





 conexión a Internet con un Router inalámbrico de banda Dual")







