

Proyecto de tesis de licenciatura por un grupo de siete estudiantes (en física aplicada e ingeniería eléctrica) en la Universidad de Linköping, Suecia.
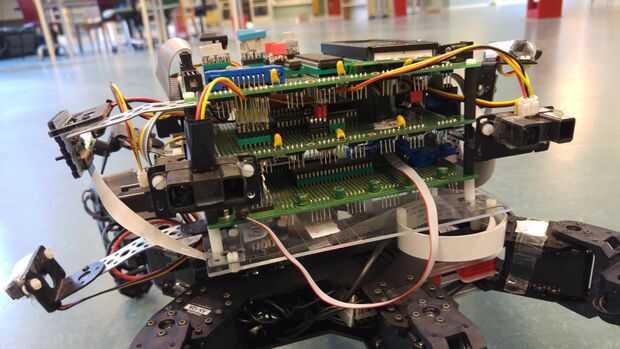
Hardware principal:
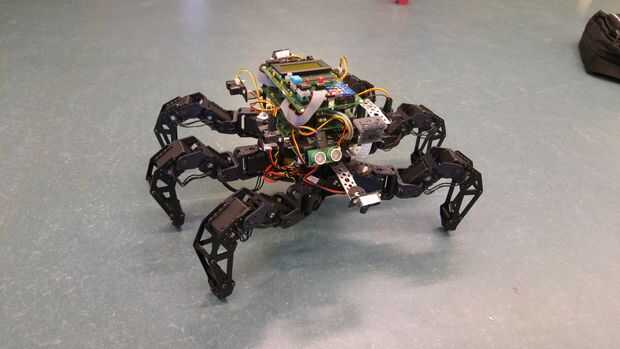
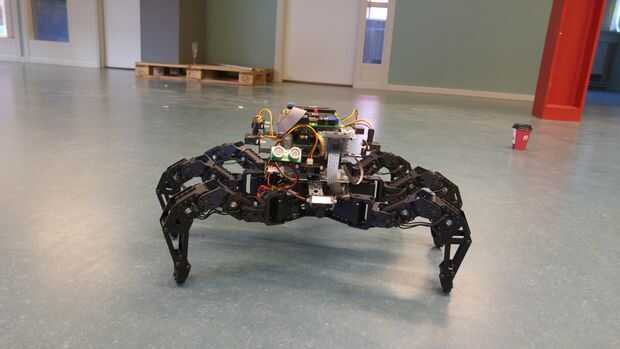
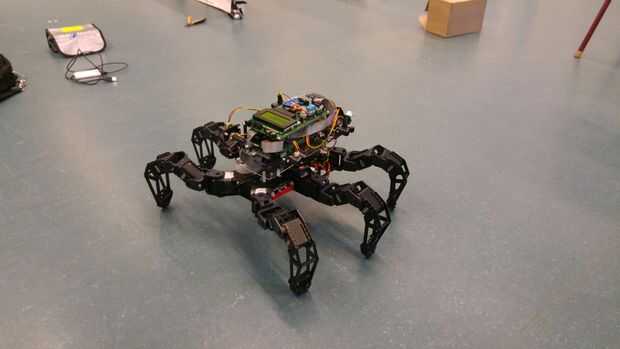
- 1 x AX PhantomX Metal hexápodo Mark II Kit (incluyendo 18 x servos Dynamixel AX-12, excepto el ArbotiX Robocontroller)
- 3 microcontroladores x ATmega1284p
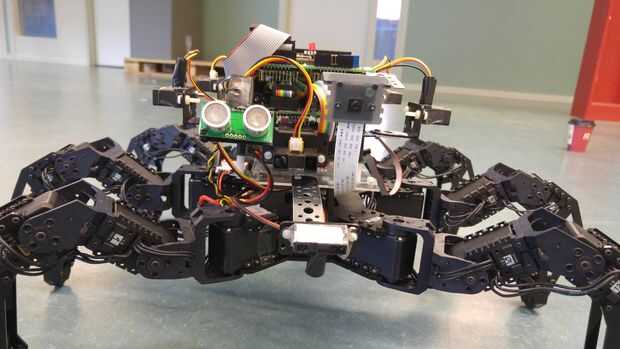
- 7 x sensores de distancia IR
- 1 x sensor de distancia ultrasónico
- 1 x IMU MPU-6050
- 1 x pantalla LCD
- 1 x módem Bluetooth de FireFly
- 1 x frambuesa Pi 3 modelo B
- 1 x frambuesa Pi cámara Junta 5 MP
El robot puede navegar un laberinto sencillo (contiene obstáculos bajas y altas) autónomo y ser controlado manualmente con un regulador de Xbox conectado a un PC. Se comunica con el PC por Bluetooth.
El sistema se divide en tres subsistemas (control, sensores y comunicación), con un microcontrolador. Los subsistemas se comunican mediante un bus SPI.
El Raspberry Pi está configurado como un hotspot WiFi y secuencias de vídeo a un ordenador Linux.
El algoritmo de a pie está basado en cinemática inversa. Se utiliza un controlador PD para mantenerlo centrado en los corredores.





")







