Paso 2: montaje
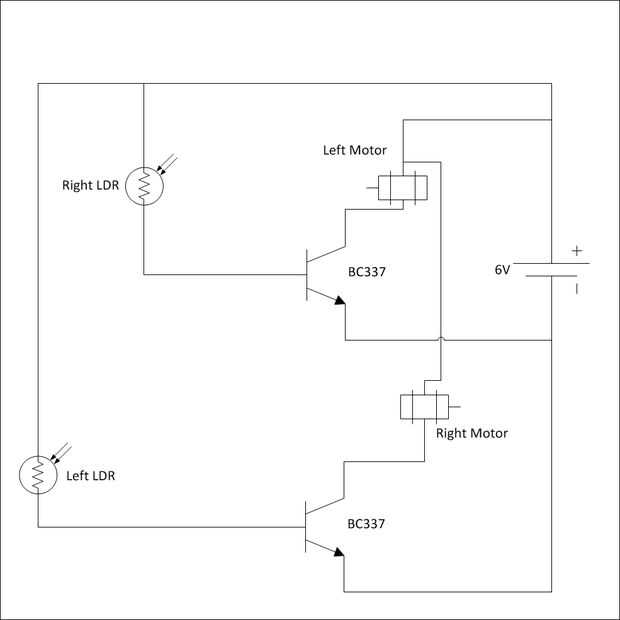
La primera foto es el esquema del circuito. En caso de que gustaría saber cómo funciona el circuito, aquí es cómo.
Cada motor es controlado por una LDR y conducido por un transistor. Cuando el LDR está en la oscuridad, su resistencia es alta. Cuando está en luz, la resistencia disminuye. Le da la suficiente luz, el voltaje a través de la LDR en la base del transistor enciende el transistor. Más luz, más "encendida" el transistor va a ser. Cuando está totalmente encendido, conducirá el motor controlado a toda velocidad.
Tenga en cuenta que el Resistor dependiente de luz (LDR) en el lado derecho del robot está conectado al motor a la izquierda y viceversa. Esto es para que cuando uno de las LDRs detecta luz, se convierte en la rueda opuesta, girar el robot hacia la luz.
Asamblea
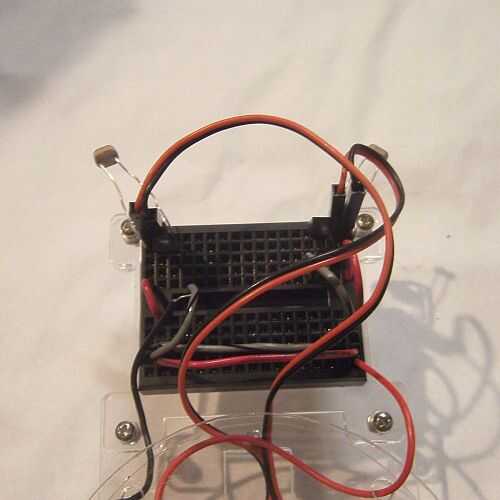
Se montar el circuito en el protoboard mini sin soldadura que viene con el kit de la robusteza de renacuajo. Cuando esté todo hecho, sería como la segunda foto.
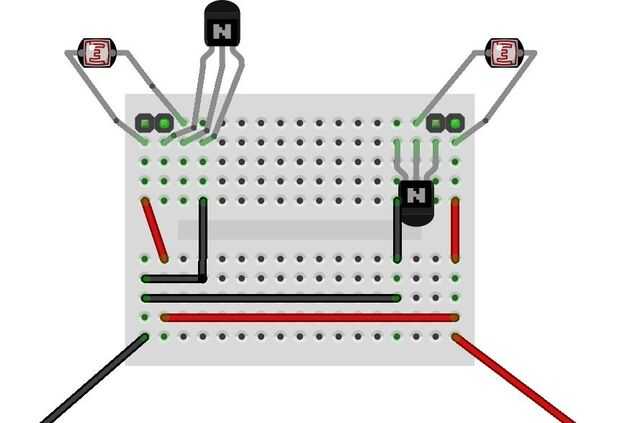
La tercera imagen muestra un diagrama de la disposición del tablero. La parte superior de la imagen es hacia el frente de tu robot.
Puede mirar las fotos y el esquema y arme el circuito ojo o siga las instrucciones paso a paso. Si eres nuevo en electrónica, sugiero seguir el paso a paso. Esto le ayudará a verificar su estructura contra las imágenes, ya que le guiarán para montar el circuito tal como se muestra.
- El cable rojo en la esquina inferior derecha es del lado positivo de la caja de batería del renacuajo. Dejarlo desconectado hasta que estés listo para probar su robot de. Este es su "interruptor de encendido".
- Los cables rojos en el diagrama están por todas partes corre de voltaje positivo de la batería. Seguir adelante y conectar a todos los del rojo los cables ver excepto la corriente a la caja de la batería.
- El cable negro en la esquina inferior izquierda es del lado negativo de la caja de batería.
- Los cables negros en el diagrama están por todas partes que el voltaje negativo (o tierra) es necesarios. Puede conectar los cables ahora. Tenga en cuenta que al revés L en forma de alambre negro en el diagrama sólo se conecta en los dos extremos, no en el medio.
- Inserte las dos cabeceras macho 2 pines en la fila superior. Se inserta en los dos orificios del extremo izquierdo y los otros insertos en los dos agujeros de la derecha. Esto es donde se conecte los cables de motores de renacuajo.
- Inserte el LDR izquierdo. Uno de los cables (cada uno) va en la fila de la izquierda justo debajo de la clavija de la cabecera. El otro cable de la izquierda LDR va en la tercera fila de la izquierda, justo a la derecha de los 2 pines en la esquina superior izquierda.
- Inserte el LDR derecho. Uno de los cables (cada uno) va en la fila de la derecha justo debajo de la clavija de la cabecera. El otro cable de la derecha LDR va en la tercera fila de la derecha, justo a la izquierda de los 2 pines en la esquina superior derecha.
- Insertar el transistor izquierdo. Asegúrese que el lado redondeado del transistor esté mirando hacia la parte superior de la placa (frente del robot). El pasador del extremo izquierdo del transistor va en la segunda fila de la izquierda, justo por debajo de 2 pines. El pasador central va en la tercera fila de la izquierda. El eje derecho va en la cuarta fila de la izquierda.
- Insertar el transistor adecuado. Asegúrese que el lado redondeado del transistor esté mirando hacia la parte inferior de la placa (parte posterior del robot). El pin de la izquierda del transistor va en la cuarta fila de la derecha. El pasador central va en la tercera fila de la derecha. El eje derecho va en la segunda fila de la derecha, justo por debajo de 2 pines.
- Ahora, doble con cuidado ambos LDRs para que se peguen hacia fuera al frente y ligeramente hacia los lados. Tenga cuidado de no corta a cualquiera de los cables de componente. Esto permitirá que tu robot "ver" cuando dan la vuelta para ejecutarlo.
- Conecte el motor adecuado a los 2 pines en el izquierdo. Sí, a la izquierda. Hay que cruzar los motores, para que tu robot va a seguir la luz. De lo contrario, siempre dará vuelta lejos de la luz. El cable rojo debe estar en el pin izquierdo de 2 pines.
- Conecte el motor izquierdo a los 2 pines de la derecha. El cable rojo debe estar en el pin izquierdo de 2 pines.
Asamblea completa! A prueba!













