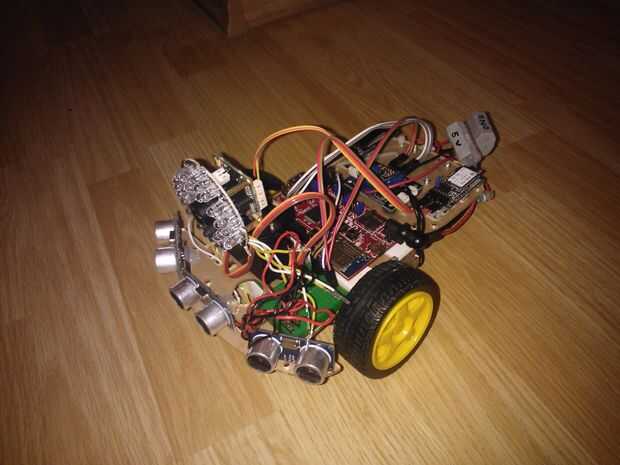
El controlador principal en rover Spy es chipKIT WI-FIRE y todo el sensor
están conectados a este controlador (PmodGYRO, PmodACL, PmodGPS y PmodMAXSONAR) y el PmodBT2 se utiliza para la conexión con dispositivos inteligentes. Los 2 motores son controlados con un puente H, y un top de un servomotor se monta una cámara de vídeo. Esta cámara transmitirá todo el marco en un pc o un dispositivo inteligente.
")






")





