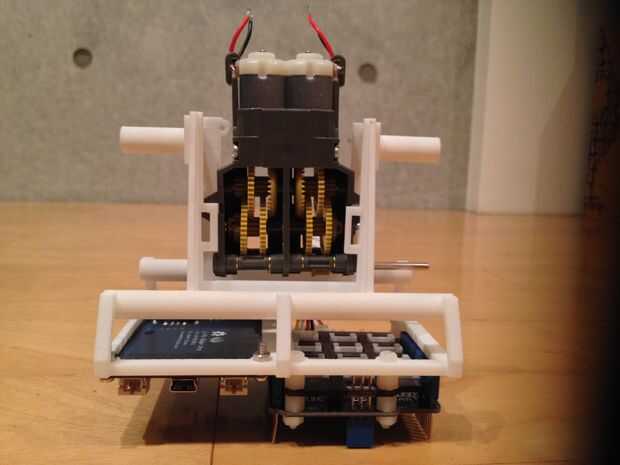
Paso 3: Montar la caja de engranajes de Motor doble
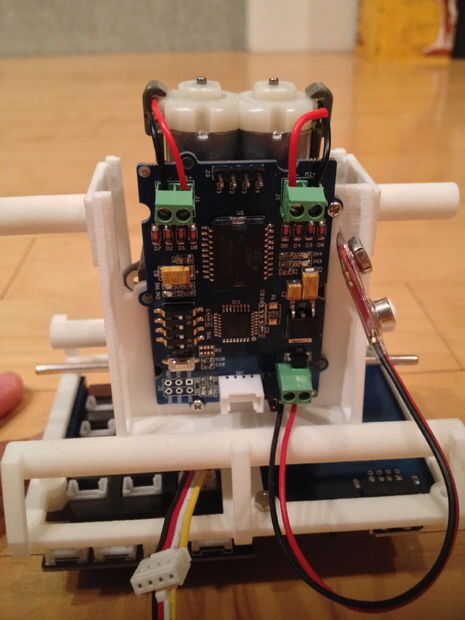
A continuación monte el conductor del Motor de i2c en el cuerpo del Strandbot usando los dos tornillos (m2, 6 x 10 mm). La carcasa de la caja de engranajes se bloquearán los otros dos agujeros, por lo que tendrás que utilizar tornillos de 5 mm sin nueces. Los orificios de montaje han sido correctamente dimensionados para asegurar un ajuste apretado sin incluso sin las tuercas cuando usando los tornillos m2, 6. Después de montar el conductor del Motor, conecte los cables de energía para los motores y la batería de 9 V terminal usando los terminales de tornillo en el tablero.
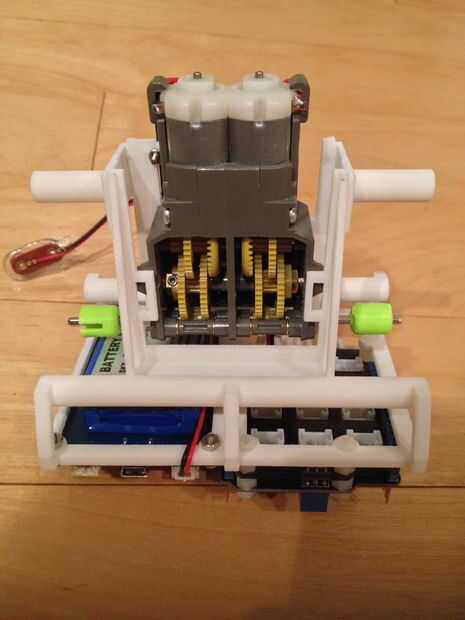
A continuación, colocar un acoplador de eje en cada uno de los ejes de transmisión. Los que en la foto fueron impresos en una impresora 3D extrusión del grado de consumidor en PLA. NO HACER ESTO. La resolución es lejos lo suficientemente buena como para caber firmemente sin algunos de los principales limpiar trabajo. Utilice las piezas de alta resolución disponibles en Shapeways para asegurar una construcción buena, rápida y fácil.
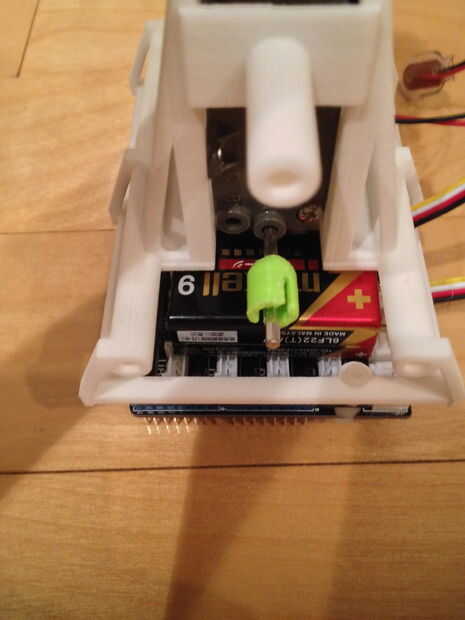
A continuación, deslice la pila de 9 V en el espacio entre el escudo base de GROVE y la caja de engranajes.
Si no haces esto ya, deslice el paquete de baterías de LiPo en el espacio en el otro lado del cuerpo.


")
")








")
