Paso 6: Encendido
Clavija del cable GROVE el conector I2C de escudo Base GROVE en el conductor del Motor de i2C.
Conecte el otro GROVE (conectado al conector A1) en el receptor IR.
Enchufe su Arduino Uno en el escudo de la Base de GROVE.
Conecte la batería de 9 V al terminal de batería.
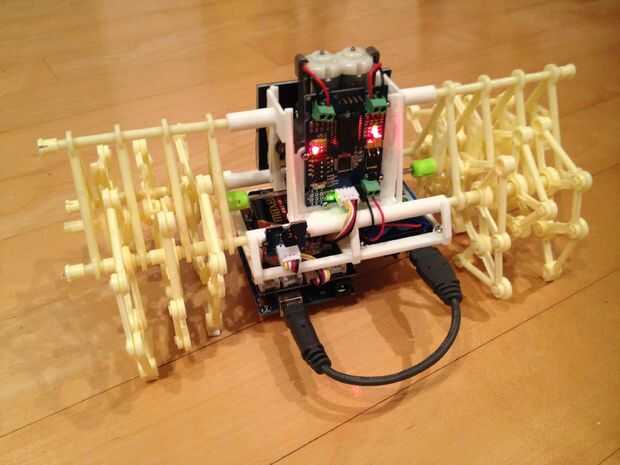
Por último, conecte el cable USB (A B) de 15 cm entre tu Arduino UNO y la LiPo Rider Pro y el interruptor de poder on!
Su Strandbot debe venir a la vida.
Ahora, darle un nombre bonito (Johnny 5?) y darle de comer algo de código para que lo mueve.


")
")








")
