Paso 7: El código
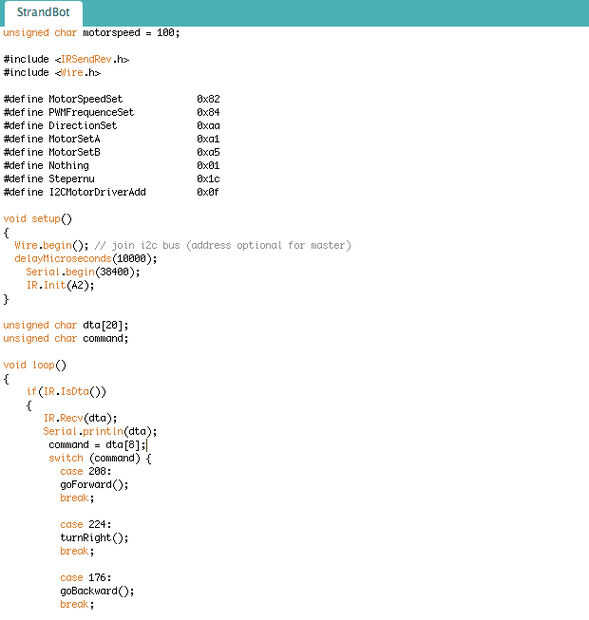
A continuación, descargar el adjunto sketch de Arduino básico y dar su Strandbot una mente.
El programa espera una señal IR, entonces le dice a que los motores se mueven en la misma dirección (adelante/atrás) o enfrente de direcciones (giro izquierda) dependiendo el comando entrante. Estos comandos son específicos para el Apple remote. Si desea controlar la Strandbot con un diverso 38 kHz remota usted tendrá que determinar los datos enviados por eso mando a distancia. El dibujo incluye un comando Serial.println para mostrar los datos entrantes en el monitor serie. La velocidad del motor puede cambiarse introduciendo un valor diferente para la variable "motorspeed" en la primera línea del boceto.


")
")








")
