Paso 2: Montaje de Hardware y Software
Conecte el servo para el microcontrolador y fuente de alimentación. He utilizado dos servos para darme más poder en las cuerdas, pero es de ti y de los servos reales que encontrará. Luego programar el microcontrolador para hacer pivotar el servo hacia atrás y hacia adelante. Verificar el código que adjunto.
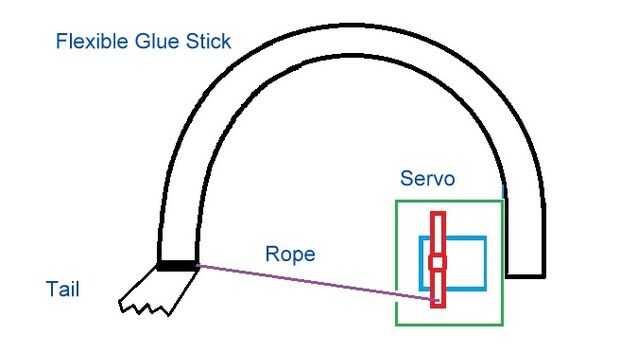
Por último, armar tu robot! El servo en una caja y la cuerda a través de la alimentación. Pegue un palillo de pegamento a la caja y dóblelo. Atar el extremo de la cuerda al extremo libre del palillo y ya está! Utilice mi diagrama como referencia, pero no dude en experimentar por su cuenta. Hay un número infinito de soluciones. Comparte tus comentarios abajo.
Las cajas que casa el microcontrolador, batería y el servo 3D impreso - no de la manera más barata pero se ve aseada!













