Paso 5: Sistema de Control
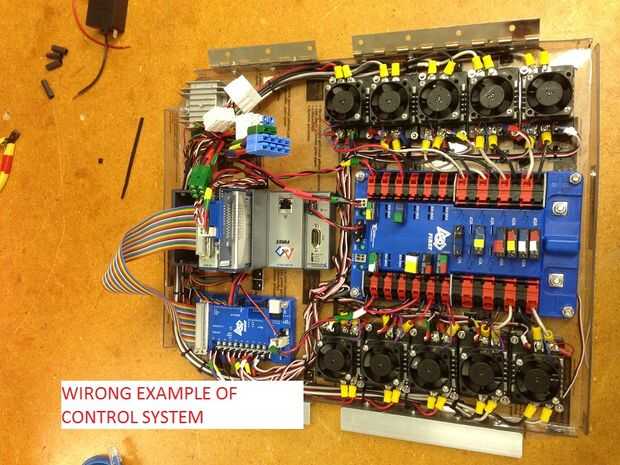
Para todo el proyecto se utiliza un río compacto NI
controlador. Que nos permite maniobrar la torreta de giro de alta precisión y tiempos de respuesta bajos. El control de la torreta es un lazo cerrado PID, con la entrada de un sensor gyro analógico regular y el motor de ventana controla el ángulo exacto de la torreta en cualquier momento. La masa está girando a una velocidad constante, facilitando el lazo PID.
Los motores de impulsión y dirección son controlados a través de un Joystick inalámbrico y en una etapa posterior será autónomo controlados en un circuito cerrado con un tablero en webcam.













