Paso 1: materiales


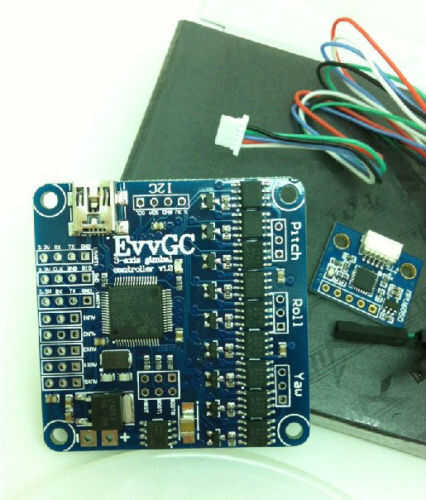
En mi caso, estoy utilizando un controlador de cardán de código abierto de EvvGC 1.3. Este controlador no tiene una herramienta de gráfica de la posición. He intentado transmitir los datos de ángulo sobre la serie, pero esta tarea es desperdiciador de tiempo para el controlador de cardán y no es una buena manera para sintonizar el PID. Por lo tanto, vas a necesitar un segundo IMU y un arduino a datos de la secuencia en tiempo real sin consumir recursos del controlador.
Usted conseguirá:
-Cardán
-IMU (estoy usando un MPU-6050)
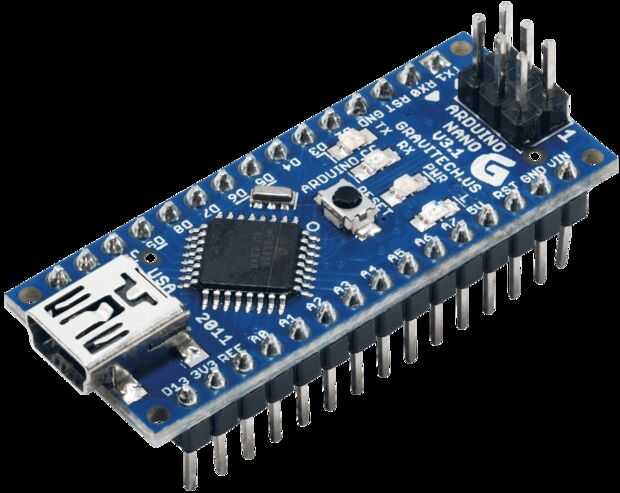
-Arduino (estoy utilizando un Arduino Nano)
Controlador de Cardan EvvGC: http://www.rcgroups.com/forums/showthread.php?t=1...
IMU MPU-6050: https://www.sparkfun.com/products/11028
")












