Paso 4: Código - procesamiento
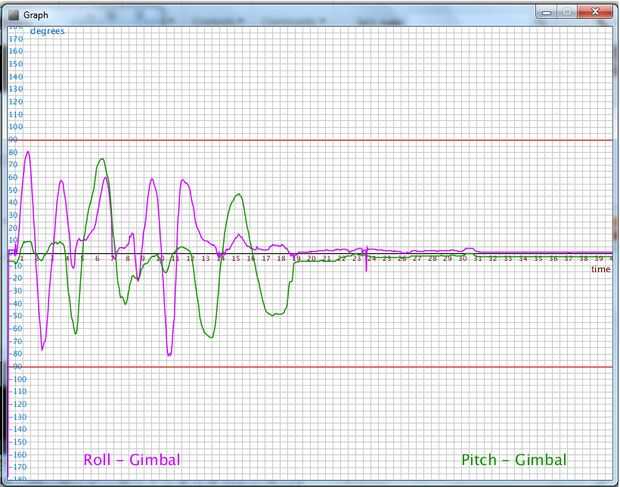
En el código de procesamiento, que acabo de hacer unos cambios en el gráfico de dibujo para ser fácil de calibrar un cardán.
Abrir IMU > MPU6050 > gráfica > Graph.pde
Entonces, habrá abierto las siguientes: Graph.pde, Convert.pde y DrawAxis.pde
Por ser fácil ver sólo el útiles ejes (x e y) puede comentar o borrar las partes siguientes en DrawAxis.pde:
/ * Dibujar el eje de giro * /
/ * Dibujar acelerógrafo eje x * /
/ * Dibujar eje x filtro complementario * /
/ * Dibujar el eje de giro * /
/ * Dibujar acelerógrafo eje * /
/ * Dibujar eje y complementarios filtro * /
Además, añadí unas líneas para mostrar la cuadrícula.
Código original: https://github.com/TKJElectronics/Example-Sketch-...
Incluyendo los cambios de código: Graph.pde y DrawAxis.pde / / utilizar estos archivos para reemplazar los originales en IMU > MPU6050 > gráfico >
")












