Nuestra intención con este proyecto era combinar dos campos de vanguardia de la tecnología: vehículos autónomos y swarmbots. En colaboración con la Academia de Fremont para estudiantes de Femineer de tecnología y de diseño, diez miembros de la clase de electrónica de la Universidad de Pomona (resorte, 2016) montado cuatro vehículos autónomos que fueron capaces de jugar un juego de "sillas musicales".
El juego es fácil de usar. Mientras se reproduce la música, los coches del círculo alrededor de la pista. Cuando la música se detiene, los coches girar dentro de la arena y buscan una "silla" - una mancha negra. Una vez que encuentren el lugar, dejan. En teoría, sería n-1 "sillas" y el coche restantes tendrían fuera de la arena, a partir de la próxima ronda.
Aunque aparentemente simple, este juego resultó para ser una hazaña de ingeniería! En primer lugar, los coches deben ensamblarse (tanto de un kit, o desmontando un coche RC Ready-made). En segundo lugar, debe ser equipados con los sensores adecuados y el regulador. Los vehículos deben tener al menos tres sensores: un seguidor de línea (para seguir la pista en la circunferencia de la arena e identificar una silla), un sensor de sonido (para saber cuándo se debe empezar a moverse y cuando gire en) y un sensor de infrarrojos (para evitar colisiones). Los coches utilizan un controlador Arduino Rev3. Cada uno de nosotros utiliza un diverso kit de coche, pero a los efectos de este Instructable, destacaremos uno (sin lugar a dudas, el coche mejor apariencia).
Lista de partes:
Carrocería (opciones múltiples)
- Coche de RC simple que puede ser destripado y utilizada como un cuerpo
- 4wd coche chasis http://www.amazon.com/Smart-Chassis-Strong-Magnet...
- coches chasis http://www.amazon.com/Smart-Chassis-Strong-Magnet...
- Tanque
Arduino Uno
Puente en H
Batería de 9 voltios
4(8) pilas AA
Sensor de sonido
3 sensores de línea infrarrojos (dos opciones, ambas funcionan bien)
- VEX Robotics línea Tracker http://www.vexrobotics.com/276-2154.html
- SparkFun RedBot Sensor - seguidor de línea https://www.sparkfun.com/products/11769
Rango de Sensor (infrarrojo o ultrasónico)
Este coche específica fue construido de un kit que no tenía ni una marca ni instrucciones, las piezas que se incluyen en el kit se emplea para fabricar la caja negra que se conecta a los peldaños.
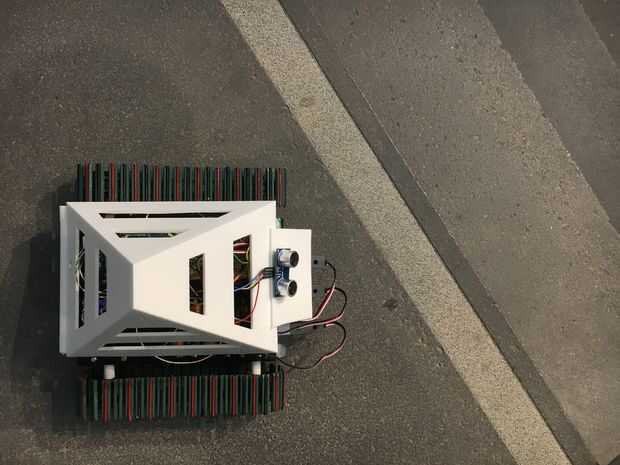
Coloca el paquete de batería y placa encima de la caja negra y coloca el conectar los cables por el interior de la caja para llegar a los motores. Los motores fueron colocados en el interior las paredes de la caja y condujo el blanco "adaptadores" que conecta al tanque de peldaños
Academia de Fremont nos proporcionó con las pisadas del tanque. Desde los peldaños no se conectaron originalmente a los motores, nosotros 3D impreso los adaptadores blanco. Además, para hacer el depósito de peldaños se mueven suavemente, que nos pegan pedazos de caucho en las desavenencias del tanque.
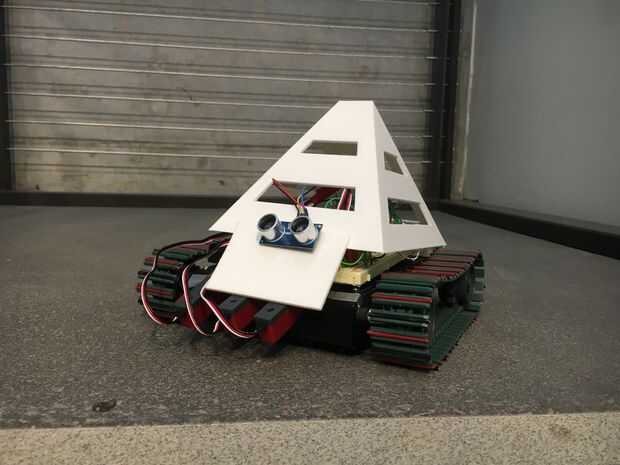
Nosotros también 3D impreso forma de tetraedro para servir como tapa para el tanque. Esto nos permitió poner el detector de infrarrojos en la parte frontal del tanque para ser capaces de detectar la distancia de los coches delante de nosotros para que pudiéramos evitar colisiones. Ponemos los seguidores de la línea de tres por debajo de la campana de la cubierta del tetraedro. Por último, utilizamos la apertura en la parte posterior para poder conectar y desconectar la batería de 9V como sea necesario.
")

")





")
")


")
